-
Radiomaster TX16S Teardown - let's see what's inside!
Radiomaster TX16S is one of the most exciting premieres of the first half of 2020. Not only it establishes itself as a second most wanted radio transmitter on the market (right behind radios made by FrSky), it brings a few very interesting features to the table as well. Some of them are:
- Built-in multiprotocol module
- Hall effect gimbals available as an option
- USB-C for communication with the radio
- USB-C charging of the 2S LiIon (18650) battery
- Color LCD with a touch option
- Two serial ports
- TBS Crossfire compatible
Today, let's open a Radiomaster TX16S multiprotocol radio and let's see how it is built inside. Does the quality match the price?
Read more... -
Beitian BN-180 GPS Module Troubleshooting
Beitian BN-180 is one of the most popular small, and cheap GPS modules used with INAV on airplanes, or on Betaflight on quadcopters. Most of the time, they work just fine, but I discovered that they could make problems from time to time. Here is a shortlist of possible issues and solutions for Beitian BN-180 GPS module:
-
Jumper T18 Review
The year 2020 is exciting in many ways. In the RC and FPV hobby, it's the year when FrSky is facing healthy competition. FrSky radios like Taranis Q X7 or FrSky X10S Horus can be easily replaced by cheaper, and in some ways better, radios like RadioMaster TX16S or Jumper T18.
-
How to setup INAV on a rover
INAV 2.5 finally allowed to use INAV and INAV compatible flight controllers to be used on rovers and boats. Finally, INAV supports not only flying vehicles. Bear in mind, that the rover and boat support is not full, and some functionalities might not be working like expected.
What works:
- Reversible ESC and motors
- Steering
- Waypoints
- Return to home on a straight line without any obstacle avoidance
- Failsafe
-
Ritewing Mini Drak Center of Gravity
Ritewing Mini Drak is a fantastic R/C airplane. Fast, stable, and thanks to smooth lines and negative swept wing, it looks great. Thanks to negative wing sweep and a long nose, it has a very unusual center of gravity (CG). Mini Drak's CG is located almost at the leading edge of wings.
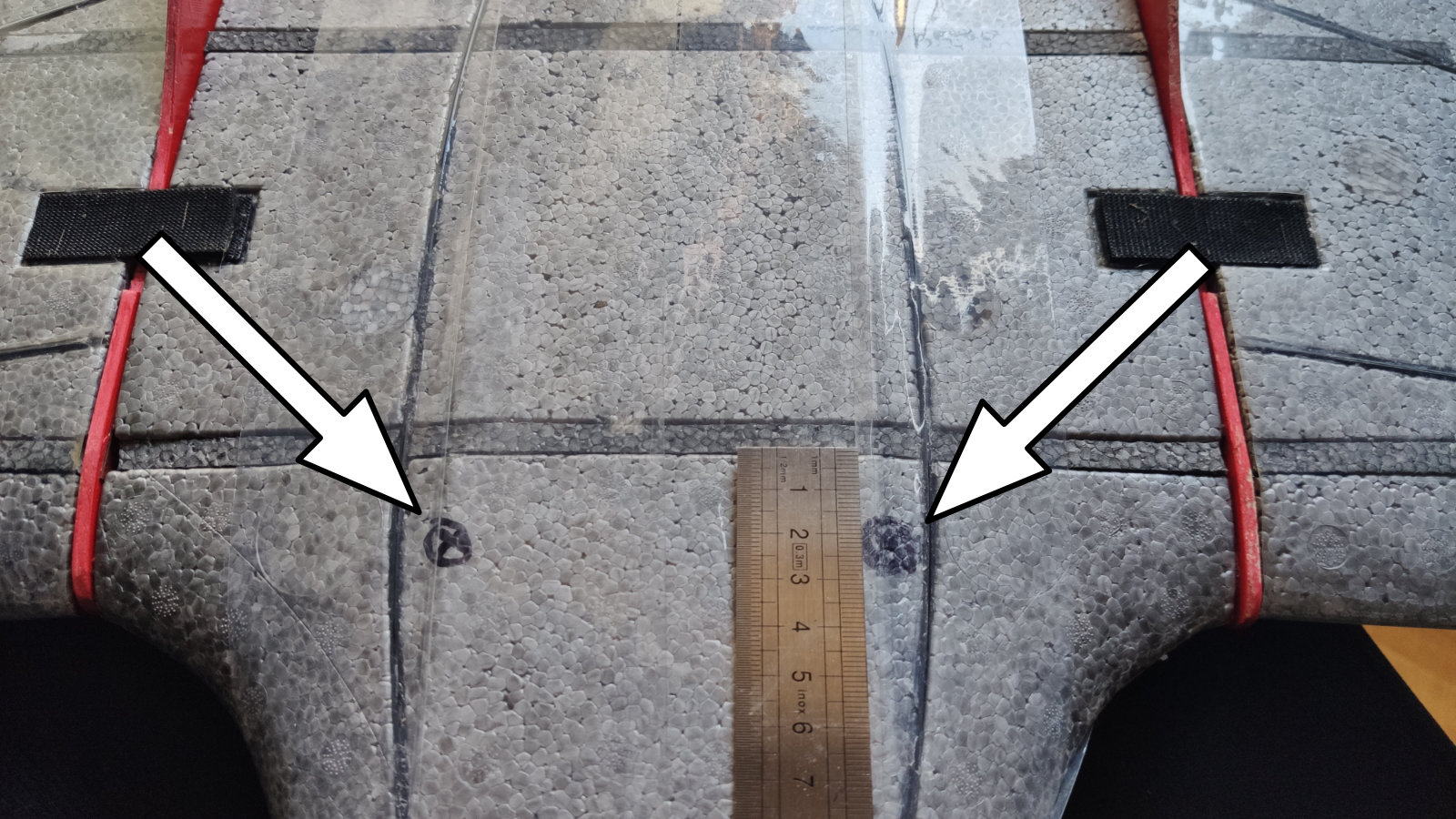
The Center of gravity should be measured from the front edge of the front wing spar.
- For beginners as well during maiden flight it should be located around 25mm (1") in front of the front wing spar
- It can be moved back to approximately 20mm (0,8") from the front edge of the front wing spar for advanced pilots.
Remember that correct setup of the center of gravity (CG) is critical for stable flight!
Read more... -
Long-Range FPV Tips
Long-range FPV is one of the hardest aspects of the modern R/C hobby. Not only will you be sending your foam airplane of drone miles and miles above the line of sight range, if anything goes wrong, but you will probably never recover your UAV. Dead servo, burned motor, broken linkage, or just depleted battery equals crash. Finding your model miles away is extremely hard even if you know the GPS coordinates and last known position. Before making a first long-range flight, do everything you can to ensure your airplane or a drone will come back safely.

Here are tips about how to do that. But bear in mind, that I will skip the most obvious tips like:
-
Radiomaster TX16S Review
Radiomaster TX16S is probably one of the two most awaited for radios in 2020. The second one is the Jumper T18, but let's not talk about it now. There will be time later to compare Radiomaster TX16S with Jumper T18. Let's take a look at this hot radio and see what changed, why it looks like black T16, and is it worth the money they ask for it.

-
Diatone Hey Tina Whoop162 with FalcoX
I will be very frank with you: I do not like those tiny whoops. You know, 2" and smaller propellers, plastic frame, a camera on top. You know, those almost cheapest FPV drones you can get. I'm saying that builds like BetaFPV 65X or Emax Tinyhawk are bad. I just do not like to fly them. Somehow flying indoor is not my thing and I do not have enough space in my home to do it. And taking those tiny things outside makes little sense. So, bottom line: not my thing.

When I was contacted to make a review of Diatone Tiny Whoop162 my first reaction was: meh... To be honest, I would turn the offer down and choose something more suited for my flying style, but then there was one thing that made me change my mind. The unit I was offered what flashed with FlightOne FalcoX and I wanted to give it a try for some time now. A few weeks later Tiny Whoop162 landed on my desk and this is my original impression of it. Bear in mind, I will ignore the FalcoX for now and concentrate only on the hardware itself. Read more...
-
Dalprop FOLD F5 folding 5-inch propellers
Foldable propellers are nothing new. We use them on RC airplanes and consumer-ready drones like DJI Mavic for years. But they were never available for 5-inch mini quads! Until now that is, since just today I got a package from Foxeer with 2 (2 and a half) sets of brand new Dalprop FOLD 5.1" folding propellers for multirotor FPV drones! Yay...


What to say... They fold indeed. My props are pre-production samples and came not assembled! Double the fun with some puzzles!



Unfortunately, I can not yet test them. It's raining and the weather forecast says it will be raining for 2 more days. But after that, nothing will stop me from testing them on my favorite flying spot!
Read more... -
STM32 F1, F3, F4, G4, F7 and H7 flight controllers
Currently, almost all flight controllers we use on our multirotor FPV drones and airplanes are powered by microcontrollers from an STM32 family. When we say about flight controller families or generations, we refer to them by the family of the MCU. For example:
F1 flight controllers are no longer supported
or
You should get F7 to do it
STM32F1
Historically speaking, F1 were the first flight controller boards for MultiWii derivatives based on STM32 MCU. All the F1 boards like Naze32 or CC3D (ok, this one is from OpenPilot family) were equipped with STM32F103 chips. Currently, F1 boards are not supported by any major flight controller firmware. Reasons are simple: low speed, lack of hardware floating-point acceleration, very little RAM and Flash memory, only a couple of UARTs. They were not powerful enough and as a result, had to die.
Do not buy and if you have one, just keep it somewhere in a drawer as a souvenir of good old times. Read more...












I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: