-
The best GPS module for INAV
This is my personal best GPS module for INAV: Beitian BN-880 based on Ublox Neo-M8N. Currently I have 3 pieces of BN-880, all works just great, and if I will have a need to have another one, I would also choose it.
Why? It really works well. On the outside it gets a solid 3D fix in less than a minute. It even can get a fix with 9-10 sats in a center of a city when only a small piece of sky is visible simply by lying on a windowsill. It take time, but works.

-
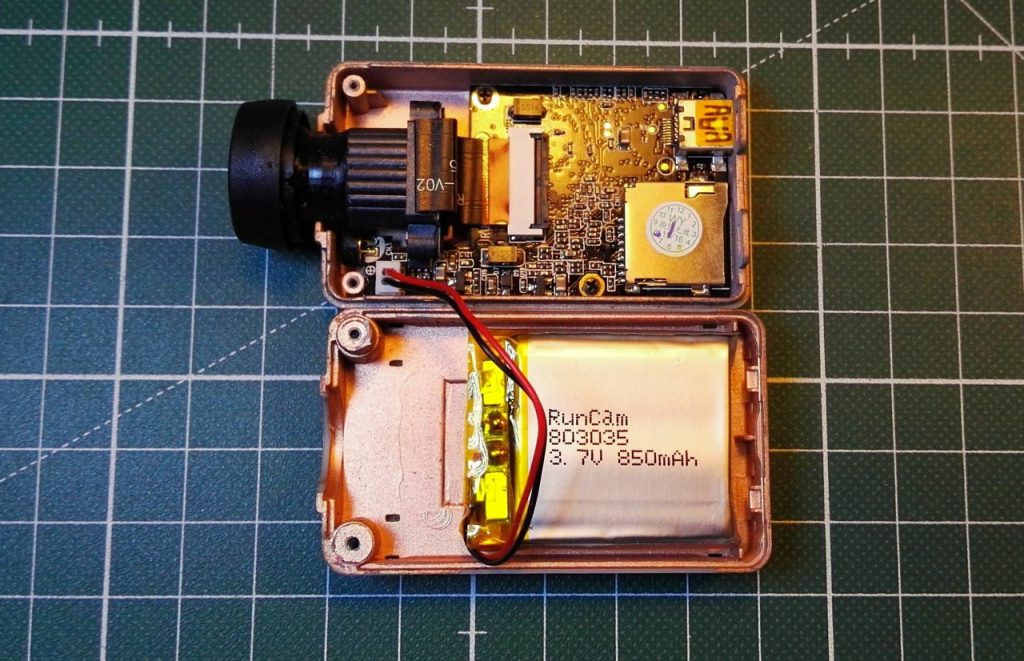
Tutorial: replace battery in RunCam HD
My RunCam HD died after 5 months in a drawer. Reason: battery destroyed. It had enough energy for approx. 2 seconds of operation. So I had a choice: buy original battery from RunCam for $9.99 plus shipment, or fix it DIY style. I've choces the second option.
Luckily for us, RunCam used generic 803035 LiPo 1S, 3,7V battery that can be purchased in specialized stores. I've paid around $6 for mine, but if you look hard enough, you should find something even cheaper. Also, luckily (or not) there is a battery plug: 2 pin JST 1.25mm.
-
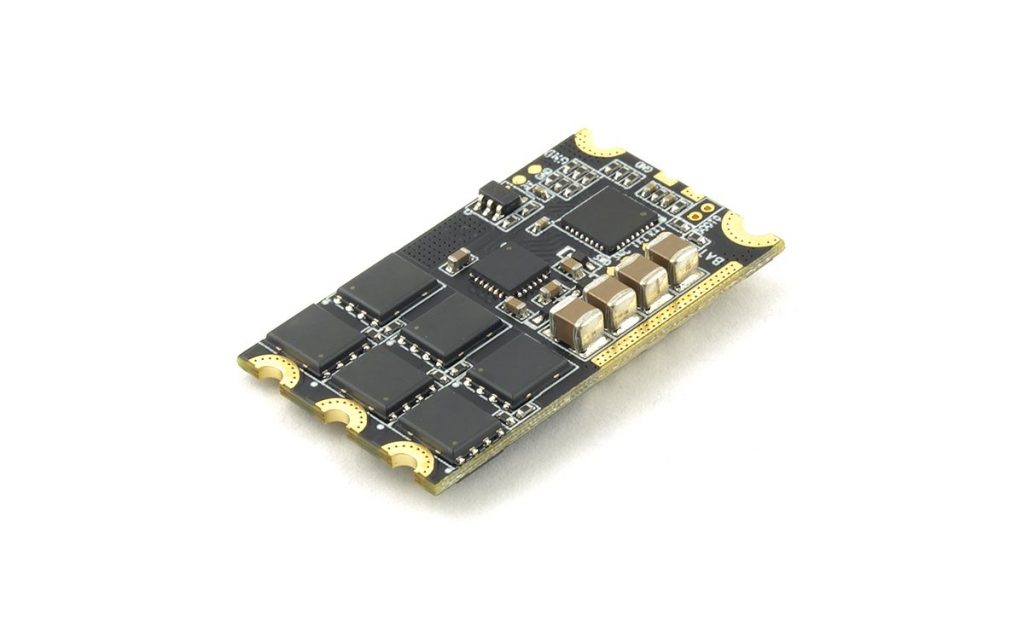
BLHeli_32, should I care?
Looks like BLHeli team is not wasting their time and is preparing something new for our multirotors. After BLHeli_S, we will also have BLHeli_32.
According to an announcement posted on RCGroups, new software for ESCs (and new ESC of course, since it will not be compatible with current Atmel and SiLabs MCU) will be:
- Running 32-bit MCU, Cortex-M0 at 48MHz (STM32F0 ??). Which, in my opinion, is a very logical step to take. Please remember, that all SiLabs (Silicon Labs) MCU powering most of our ESC, are under the hood old Intels 8051. And please remember that Intel 8051 was created in 1980. 37 years ago...
- There are few places where additional computational performance can be spent. For example:
- Programmable PWM frequency up to 48kHz
- Auto timing for better efficiency
- Programmable brake on stop power, very useful for folding propellers
- Voltage and current limiting
- DShot1200
- and more...
ESCs with BLHeli_32 are not available yet, but Airbot already announced Wraith32 Plus (with voltage and current limiting) and Wraith32 Mini (without voltage and current limiting).
Read more... -
Hands on: Eachine ProDVR
Since cameras like GoPro Session are heavy and my FPV goggles (Skyzone SKY-01) lacks built-in DVR, I've purchased DVR by Eachine: Eachine ProDVR. There is probably enough written on the web how it's made and that it has problems with PAL signal and there are hacks to fix it. Oh well...

Instead, here are just some pros and cons, and short summary at the end. Read more...
-
GPS Racer: worklog #2
I'm once again realizing, that doing multiple things at once is not a way to work. Something like that happened to my GPS Racer project. According do original plans, week ago I was only supposed to wait for FPV camera.
Instead of that, only yesterday I finished ESC and motor assembly. But OK, it was a little trickier than I expected originally:
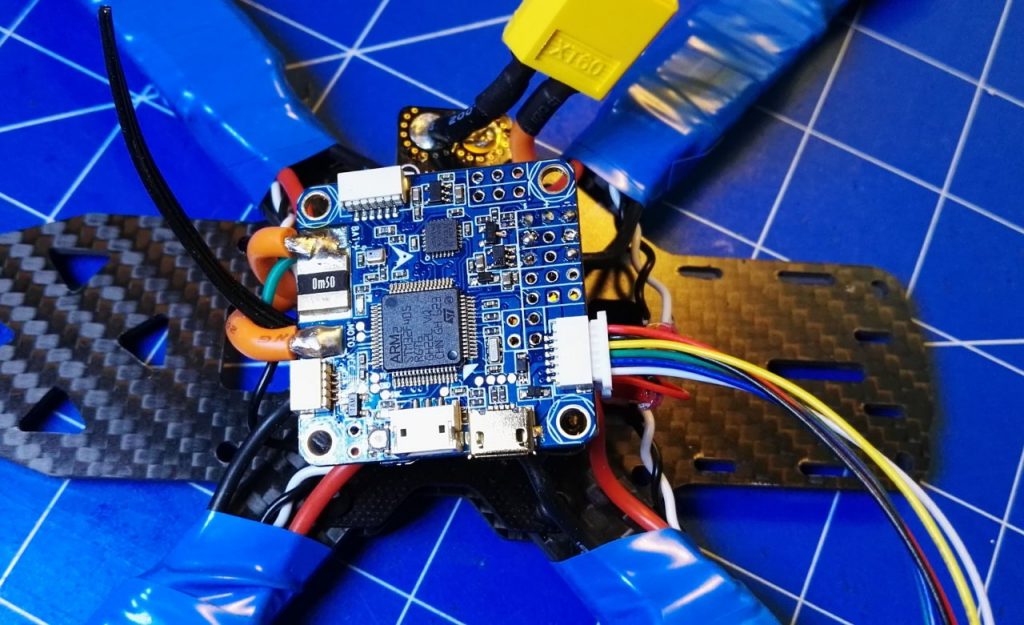
- Since I wanted to reuse onboard current meter of Airbot Omnibus F4 (v2) Pro and use Matek XT60 PDB at the same time, I had to do some creative wiring between XT60 plug and PDB.
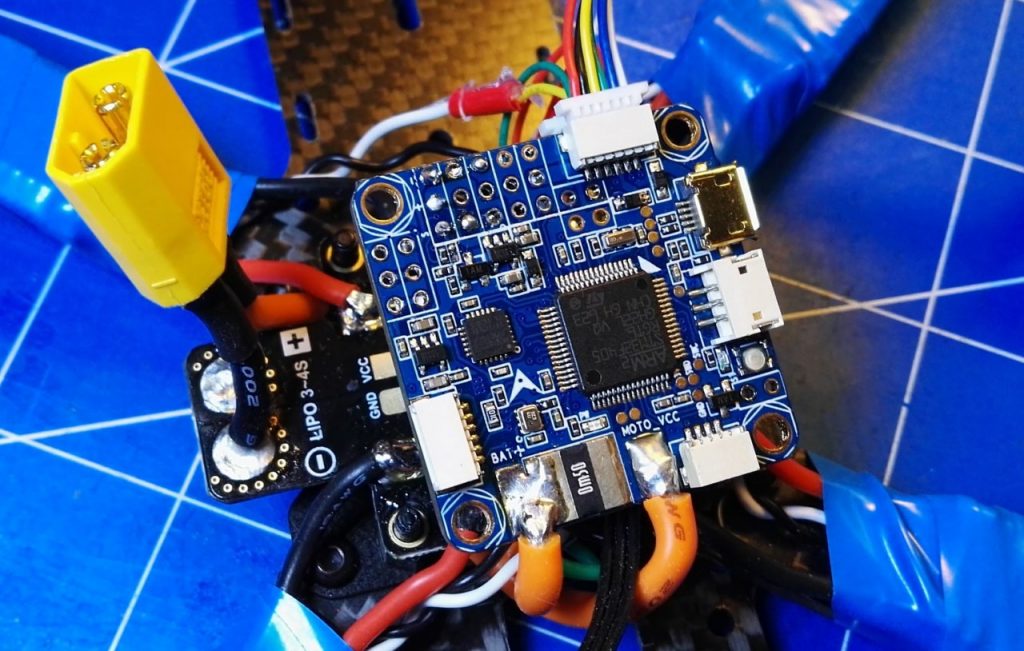 Instead of directly connecting XT60 plug to PDB, + first goes to current meter on Omnibus F4 Pro and then goes back to PDB. Not pretty, but works. I still have to design some kind for power plug holder, but this topic can wait. I still have no FPV camera
Instead of directly connecting XT60 plug to PDB, + first goes to current meter on Omnibus F4 Pro and then goes back to PDB. Not pretty, but works. I still have to design some kind for power plug holder, but this topic can wait. I still have no FPV camera - I had some problems with ESCs. Not only I've destroyed Motor1 soldering pad, but failed to flash FVT Littlebee 30A with latest BLHelli. Bootloader survived, but BLHeli was gone. I have to connect ESC to other FC and then reflash. I wonder if it was hardware or software issue...
Right now, apart from FPV gear, FrSky receiver, GPS mount, SmartPort inverter and final assembly GPS Racer is few steps closer to being finished. With upcoming Easter, it should be functional in April. Can't wait...
Read more...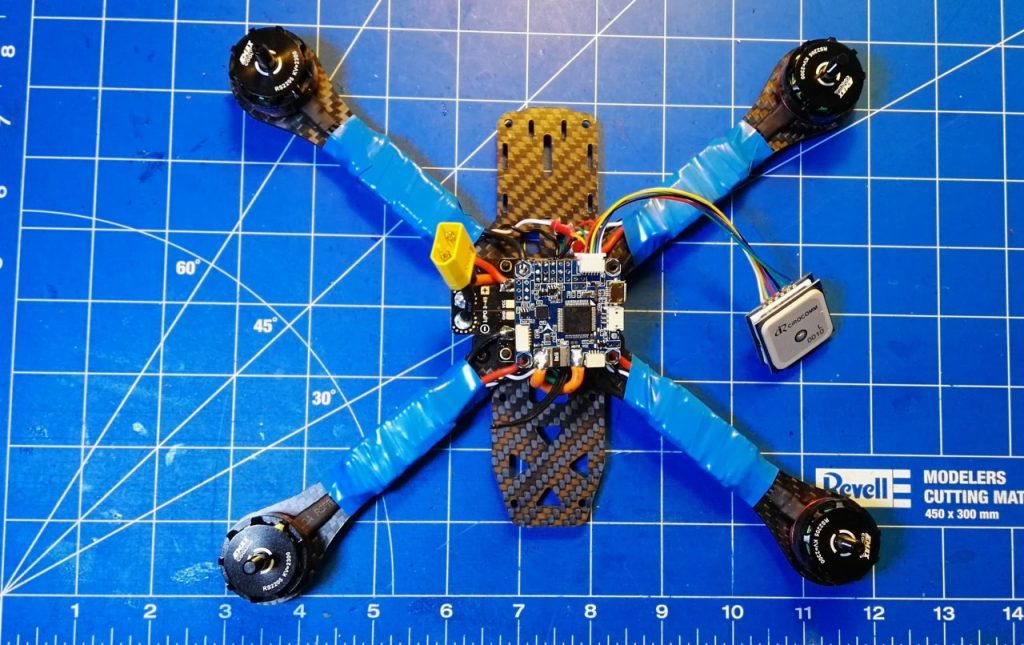
- Since I wanted to reuse onboard current meter of Airbot Omnibus F4 (v2) Pro and use Matek XT60 PDB at the same time, I had to do some creative wiring between XT60 plug and PDB.
-
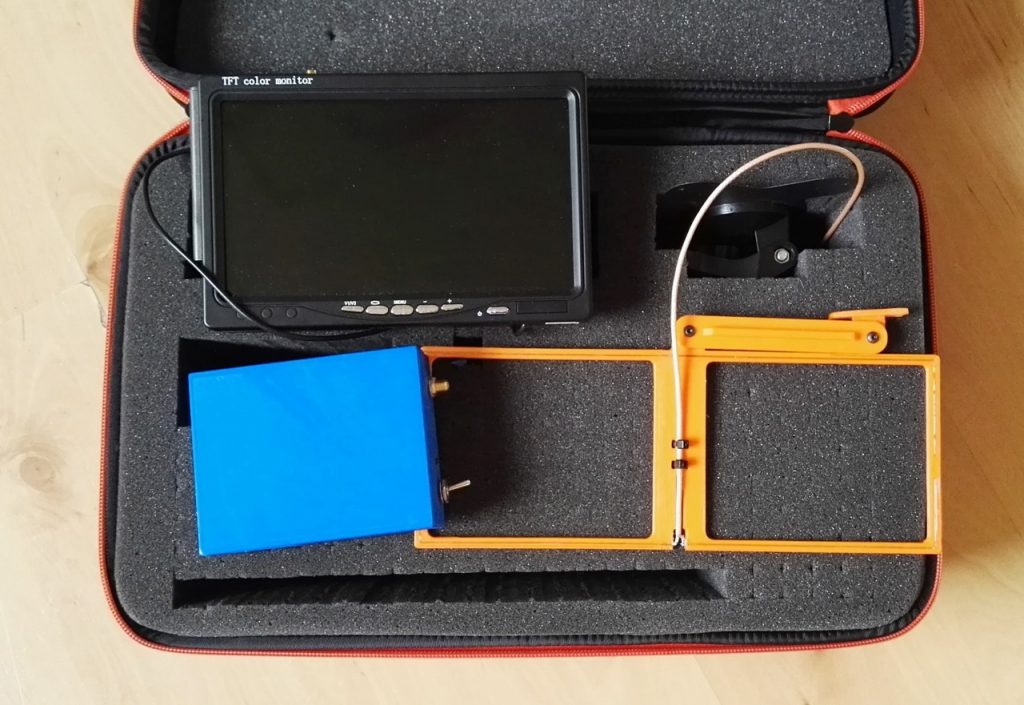
Eachine DIY Suitcase - quite a lot of space inside
I finally had some time to play around with my DIY Eachine Suitcase only to realize this item is no longer available on Banggood. Oh well...
OK, let's get back to the suitcase. Like I wrote last time: it's too small to hold 220 class mini quad with 3-bladed propellers on. But it's big enough to hold some other stuff. I always had a problem where to put DVR and some 433MHz telemetry stuff I'm using from time to time.
For such a purpose, this suitcase is just perfect. Maybe even slightly too big. Right now it holds:
- LCD with DVR
- LCD stand
- 3S lipo
- 433MHz LRS-Bluetoothe brigde
- 433MHz Moxon antenna
- 433MHz dipole antenna
- 5.8GHz dipole antenna
And there is still a lot of free space inside. Hmmm.... And I have no idea what else to put there...
Read more...
-
Mini Flying Wing: MiniWing v2
Miniquads are fun, right? After all, there is a reasons most uf us flies 210-250 quadcopters. If so, small flying wings should be fun too! I tried that already in late 2015 and failed miserably! My design did not survived maiden flight. Well, things like that happens from time to time, so few months ago, after learning few new things, I've made a second attempt. And this time I've succeeded.

-
3D Printed HC-12 and HC-06 telemetry relay box
It's a very nice feeling when people starts to create accessories for your inventions. OK, maybe "invention" is too strong word here, but still.
EduardoChamorro designed a 3D printed case for my HC-12 433MHz to HC-06 Bluetooth bridge that I published here last year.
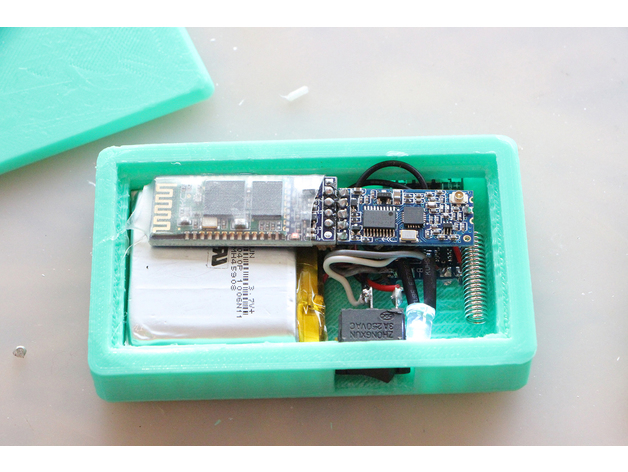
It's small, it has a switch and status LED. It also has integrated LiPo battery and a charger. Awesome!
Project can be downloaded from Thingiverse.
Read more... -
Project "GPS Racer" - worklog #1
I know that I should not start new project when old one are still in progress. I really, really know that. But since I've somehow lost my interest in Project Dualcopter and I have a real need for a new quadcopter, Project "GPS Racer" has finally started.
What is GPS Racer? During my work as INAV developer, I've realized that I do not have a good platform for it. The only GPS enabled multirotor I own is Sparrow Hawk. And it has a gimbal, weight 2kg and is hard to transport. When Sparrow Hawk crashes, there is always something broken.
So, to be able to test navigation related features of INAV, and not have to rebuild every single crash, I've decided to build dedicated UAV. For most elements I will be using parts that I already have. I only had to order frame, propellers and GPS module. Read more...
-
Cleanflight is still dead...
When week ago Dominic Clifton replaced all Cleanflight source code with Betaflight, I've written than Cleanflight is dead. Few people agreed, few (including Dominic himself) stated that it was a good idea. Main argument was that Cleanflight needed F4/F7, Dshot, CMS support and so on. Yes, CF needed that. This is true. In theory, with that one move Cleanflight got everything what it need. But also lost all it's uniqueness. Further narration wast that all those things that only CF had will be readded on top of Betaflight code.
One week later I repeat: that was a bad move and here are my arguments:
- All Open Source projects exists only thanks to The Community. The bigger the community, the better. I did not participated in Cleanflight development much. Only few really minor pull request. I joined the hobby too late. Many developers worked on CF code for months, maybe even years. Not only Dominic. If someones arbitrary decission would just "erase" my contribution (in both code and know-how) I would be pretty pissed off. Really, there was a reason all those people participated in CF. Now, all their work that was not present in Betaflight, is gone. That is not encouraging.
- The same goes for 3rd party apps like EZ-GUI. All of them lost CF compatibility over the night. Will they be willing to adopt to the changes?
- I'm really not sure is reimplementation of Cleanflight specific features on top new code will be simple enough to be done in reasonable period of time
- The biggest programming problem I see are resources. Betaflight is in very comfortable situation: it, more less, can ignore the fact that servo and motor outputs can not share the same timers. After all, who uses servos on mini quads? And CF is (was) not only about mini quads. What about airplanes? Are resources ready to handle servos and motors at the same time and prevent all potential clashes? I doubt it
- Changing codebase maybe looked like a best solution to get F4, Dshot and so on. But was not the only way. Somehow INAV got it after all. And Betaflight got it. How? Thanks to The Community













I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: