-
Vlog: Best way to backup and restore INAV configuration
Here I give you another video tutorial on my YouTube channel. This time, I give you the best way to backup and restore INAV configuration using diff command.
Read more... -
STM32 F1 and F3 versus LRS 433MHz interference issue
This topic first appeared on my table few weeks ago. Can a flight controller interfere with long range system running on 433MHz band like openLRSng?
STM32 F1 and F3 based CPU running most flight controllers (Naze32, SPracingF3, Flip32, CC3D, etc.) run on 72MHz. Actually this is 8MHz of external clock and 9 multiplier. But still, CPU itself runs on 72MHz. Most LRS systems runs between 413MHz and 453MHz, with most channels grouped around 432 and 433MHz frequencies.
This might create a problem, since 432MHz is a 6th harmonic frequency of 72MHz. Theoretically, perfect square wave should have only odd-number harmonics, but in the real life, both even and odd harmonics are present.
Are those frequencies from flight controller "visible" in 433MHz band and can they affect LRS systems? I do not have LRS system yet, so I can not answer the second question. But I can answer the first one with the help of a small RTL-SDR radio dongle.
The test
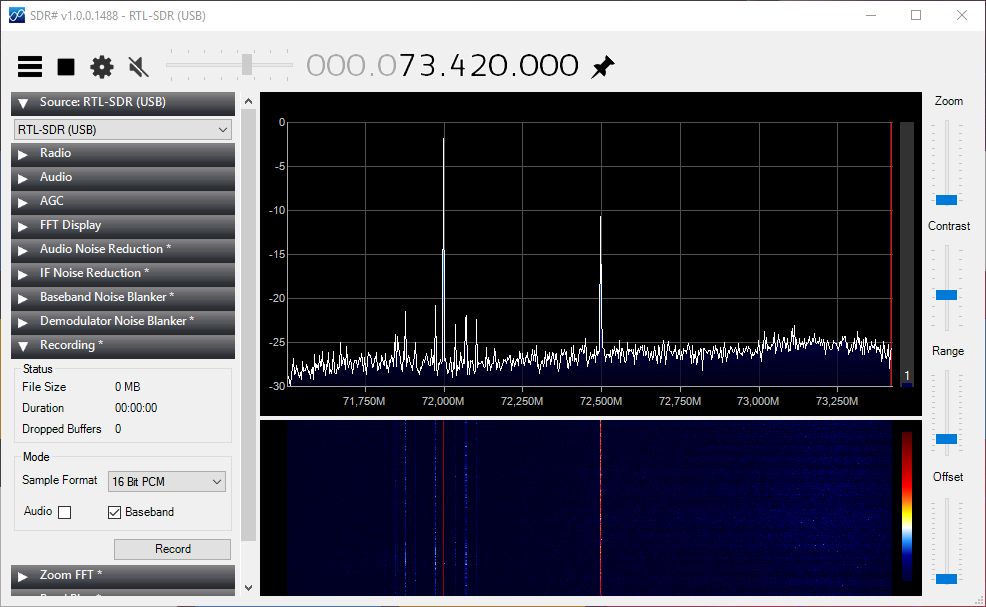
Tests were performed with a RTL-SDR and FM frequency antenna (I know, far from perfect) placed 20cm, 10cm and 5cm from running Flip32 10DOF flight controller (STM32F1 CPU at 72MHz).
According to SDR software, exact clock frequency was 72,MHz which was caught nicely on the radio spectrum.
-
Vlog: how to use INAV 1.6 Presets
I've decided to become a vlogger, youtuber, or however you might call it... Well, not really, but I've decided to be more active on my YouTube channel.
Today I give you: How to use INAV 1.6 Presets.
If you liked it, please subscribe.
Read more... -
Cleanflight is dead...
Only 5 weeks ago I've written that Cleanflight has a problem. Looks like, the problem was much bigger than I expected. Today in the morning, Dominic Clifton aka. Hydra essentially killed the project by resetting GitHub repository to Betaflight 3.1.
It was announced on Facebook:
Cleanflight v2.0.0-RC1 is out now, with all the new features from Betaflight v3.1 - please share this post!
Thanks to the hard-working betaflight developers especially Boris B, Jason Blackman and Martin Budden who have been doing fantastic work for us all!
Also, all GitHub Issues and Pull Requests were deleted.
What does that means? More less the following:
- Cleanflight lost all it's uniqueness and is Betaflight under different name
- Pilots that were using Cleanflight on airplanes or big multirotors are left alone. Betaflight aims on mini-quads, not airplanes!
- Why anyone would want to use CF when BF is there and this moment it offers better community support?
The way I see it, it was a nice ride, but now it is over and Cleanflight is dead. Too bad, since it had a huge impact on multirotor community over last few year...
Read more... -
Fixed Wing 101 - Lift, Angle Of Attack and Stall
With this short article I would like to initiate new series: Fixed Wing 101 where I will describe some basic concepts connected with fixed wing airplanes that should help beginners to enter the hobby. Today: why airplanes fly and why, from time to time, they fall down from the sky...
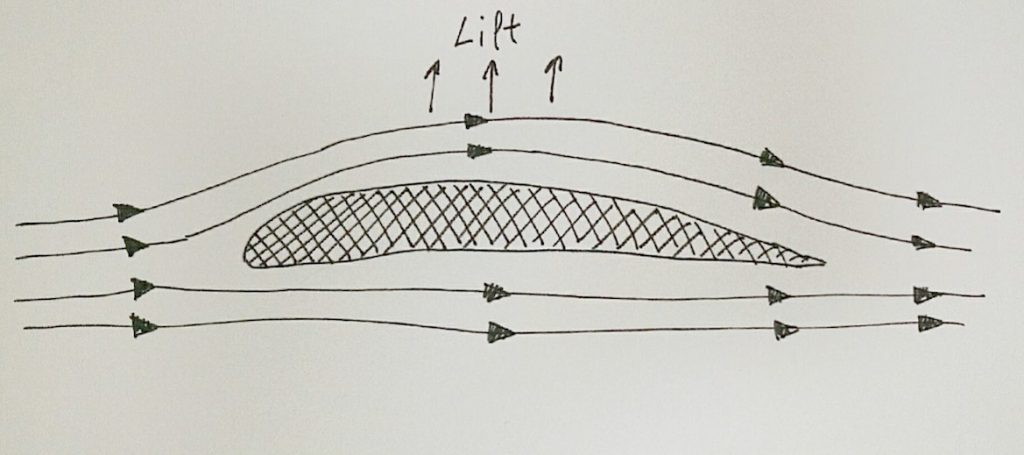
Lift
Airplanes fly thanks to the lift. It is a force generated by wings (by the way, propeller thrust and wing lift are the same force. After all, propeller is a rotating wing) thanks to pressure difference. When air pressure below the wing is higher than above it, lift appears. To archive level flight, lift has to be big enough to counteract mass and gravity.
The most important condition for a wing to generate lift is: wing has to move though the air (or air has to move around the wing). If there is no movement, there is no lift.
When there is air movement, there are two factors responsible for lift:
Bernoulli's principle
Bernoulli's principle states:
when gas or liquid is moving faster, it has lower pressure.
Simple. To obtain lower pressure above the wing, we have to make air move faster over there. This is why wing has a shape (airfoil) it has: top side (above chord) of a wing is longer than the lower side. Wing splits air into 2 stream. Upper one has longer way to travel than lower one, so it has to move faster. If it moves faster, it has lower pressure. If it has lower pressure, lift appears.
-
Review: BuildTak Printing Surface
For last few months I've been happily 3D printing PLA on glass. Prints were repeatable, initial adhesion was just fine, ready print was easy to remove after glass cooled down. But I wouldn't be me if I did not wanted to try something new. So I tried "the ideal 3D printing surface" BuiltTak.

My initial impressions were very positive. Nice mate surface a little similar to fine grain sanding paper. I was a little afraid that adhesion will be even too good and it will be hard to remove the print. But hey, they had to think of it, right? After all, BuildTak is quite expensive after all. Read more...
-
How to print with elastic filament
Elastic filaments opened brand new areas for 3D printing. We are finally able to print something that bends, compresses and stretches. While TPE (ThermoPlastic Elastomer) filaments like NinjaFlex or FlexiSmart are still about 4 times more expensive than plain old PLA, they are not so expensive not to give them a try.
Unfortunately, due to the fact that they are elastic even before melted and extruded, they require special printing conditions. During my experiments with FlexiSmart I've came down to following conclusions:
- Because TPE is elastic, flow through the nozzle has to be as smooth as possible. If not, it will coil inside extruder
- Bowden extruder system greatly increases chance of failure. Friction of bowden, while small enough for ABS or PLA, is too big for TPE. Filament will coil. Direct extruder gives less chance of failure
- One has to pay big attention to the distance between extruder nozzle and bed. Usually it has to be a litter bigger that for PLA or ABS. In all the cases when I was switching from PLA to TPE, I had to raise nozzle a little. If not, TPE coiled. TPE has better initial adhesion than PLA, so rising a nozzle does not have side effects
- Filament retraction is a huge NO NO. Disable retraction since it will increase the chance of coiling significantly
- With no retraction it is a good idea to enable Combing. Nozzle, instead of taking the shortest route to travel, dripping TPE everywhere, will move above already printed layer. This greatly improves print quality
- Top printing speed is
30mm/s, but I recommend slower speeds. I have best results when printing at15mm/s. On25mm/squality is still acceptable, but degradation starts to be visible - I had best results of TPE printing on glass with
220degnozzle temperature and60degbed temperature - Not everything can be printed with elastic filament. Any thin vertical structure will come deformed. After all, it will move during printing due to a friction with extruder nozzle
While I was printing with FlexiSmart, almost all points from the above list will be true for other TPE (NinjaFlex). Temperatures might be slightly different, but general rules applies.
Read more... -
Mechanical Bat: Bat Bot B2
Nature gave ability to fly to birds, insects and some mammals quite some time ago. We, as a species, learned how to fly only very recently. And let's be honest here. We are not very good at it. We need machines to fly. Any our machines are not very efficient at that task. They require huge amounts of energy to do it, need maintenance and make a lot of noise. Look at birds and bats. They fly for longer using less energy. And they do it with grace.
This is project that caught my attention only today: mechanical bat from University of Illinois called Bat Bot B2.
Bat Bot, from Caltech von PopSci
Take a look at that video. Maybe it's not stable or capable of longer flights yet, but I'm really, really impressed. One day I would really like to have an UAV like that!
Via Hackaday
Read more... -
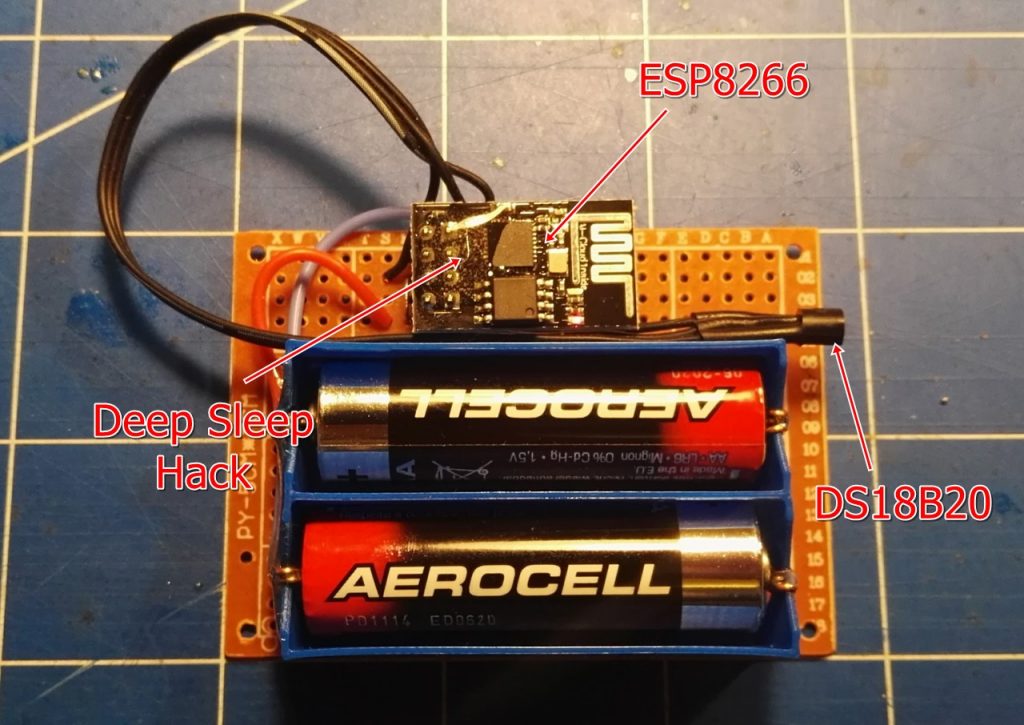
ESP8266 and DS18B20 - wireless ThingSpeak sensor
Here is another small project of mine: battery operated ESP8266 ESP-01 WiFi thermometer using DS18B20 and ThingSpeak API to collect data.
Before we proceed, you should:
- Know how to program ESP8266 with Arduino IDE
- Know how to run ESP8266 on battery power for months
- Have an account on ThinkSpeak, create a channel and obtain write API key
-
Hardware SmartPort Inverter using BC547 bipolar transistors
This post is only a short update for SmartPort inverter for F4 flight controllers. Here is alternative SmartPort inverter circuit using bipolar BC547 instead of unipolar 2N7000. All other aspects of operations are the same like in MOSFET version.
Read more...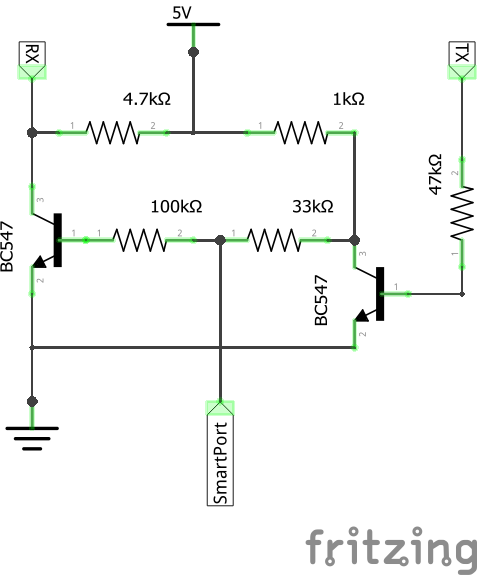








I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: