-
HC-SR04 is crap and there is nothing you can do about it...
Only few days ago I mentioned that I started to reintroduce sonar support to INAV. When DigitalEntity told me that popular HC-SR04 is crap I did not belived him. I expected that "official" 4m range on a noise-machine aka quadcopter is unrealistic, but data I recorded today clearly shows: HC-SR04 is crap and is absolutely not suited for quadcopters and probably other UAVs. Why? Because it goes nuts and starts to pick background noise instead of surface.
Let's take a look here:
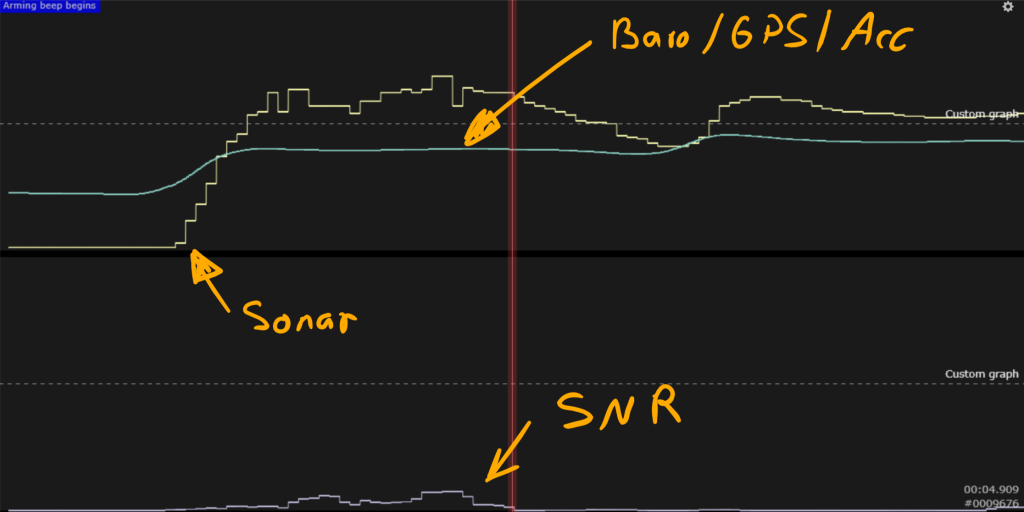
Bottom trace shows pseudo Signal-to-Noise-Ratio (SNR) while top one shows raw HC-SR04 altitude and INAV position estimator altitude (GPS, barometer and accelerometer combined). As you can see, it's not that bad. There is a correlation between both of altitudes and SNR is pretty low.
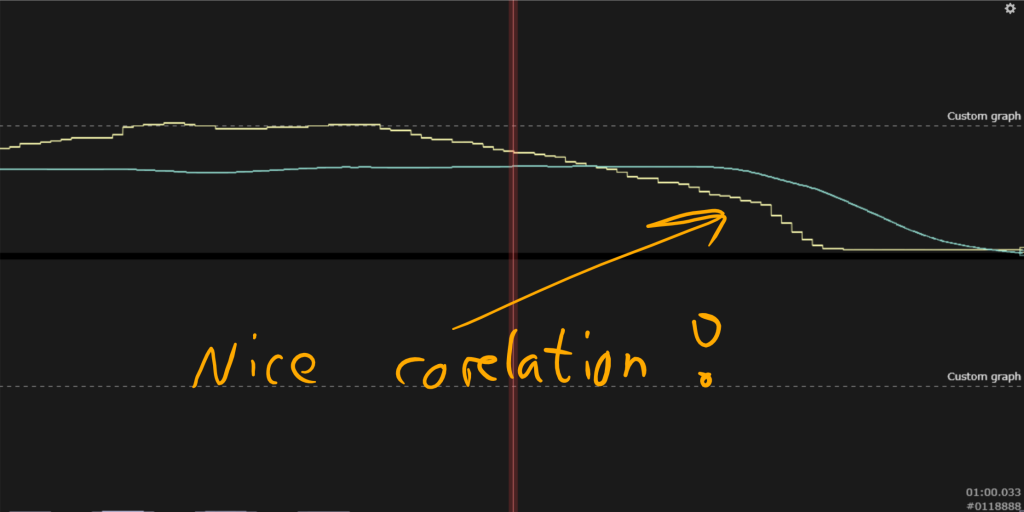
Same thing is happening here. Quadcopter descended to land, both altitudes went down to finally meet at
zero. SNR is low too. Nice.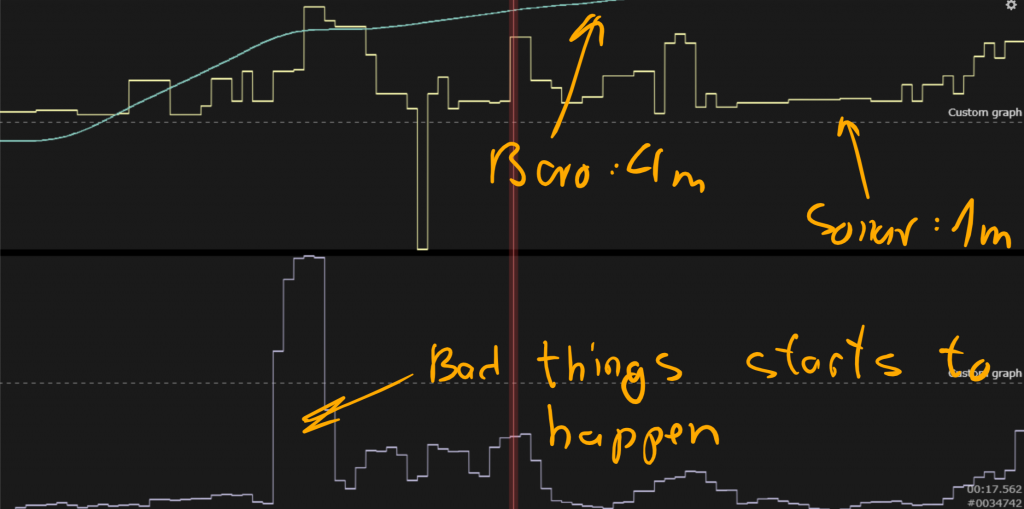
But, very bad things starts to happen as soon as altitude crosses 1.5m. Not only SNR goes up, but HC-SR04 starts to report completely unreliable data! If it was reporting out-of-range state, it would be fine. But no, it keeps reporting something between 1 and 2 meters while real altitude is much higher. Total crap.
Conclusion is simple: HC-SR04 can be used on multirotors but only on very low altitudes. Something like 0.75m over concrete. Or 0.5m above short grass. Or even less over long grass. Definitely not good enough for terrain following flight mode.
Next week I will test US-100 ultrasonic rangefinder. It is supposed to give much better results. I hope so...
Read more... -
Flight Controller Soft Mount - is it worth it?
Is it worth to soft mount flight controller? Are gyro pads I recommended here better than rubber standoffs? I feel that they are better, but I do not have any solid data to prove it. So I can only tell, that I find them better and that is all. But, I can answer the question is it worth to soft mount flight controller at all. The answer is YES and here is a proof...
The problem of twitching motors
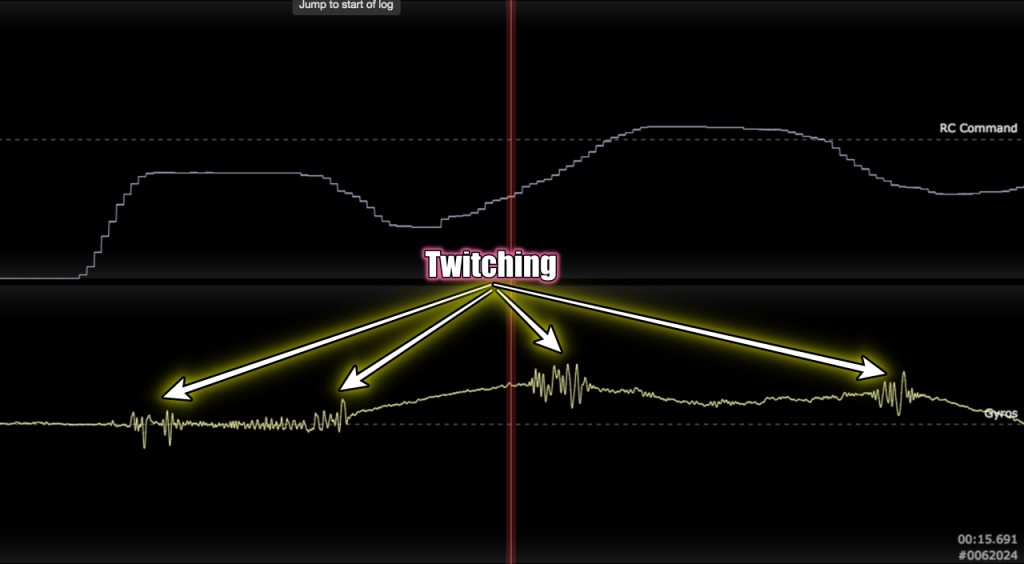
After I updated my 5" racer to stronger motors (EMAX RS2205S 2300KV over RS2205 2300KV) I noticed something very very irritating: twitching motors. When the throttle was in more less middle position or after rapid throttle change, twitching from motors was very audible. Quad was flyable, but performance was very low. I had to reduce yaw P gain by more than 50% not to see those twitches in FPV footage!
Blackbox log revealed the truth: from time to time, the strong vibration was getting into yaw gyro traces. I also localized the source of those twitches: stronger motors with more torque and higher radial acceleration were able to shake the whole machine when the frequency was close to the resonance frequency of the frame.
-
And the most popular flight controller for INAV is...
Did you ever wondered what is the most popular flight controller? Hardware I mean. I can tell you :) OK, maybe it will not be a full truth, since I have data only from INAV, but assuming that distribution for Betaflight and Cleanflight is similar, we might know what is happening...
Important, this is not the number of boards flashed with INAV, but rather number of times a board was connected to Configurator!
This counts TARGET software name, not retail name. For example, all clones of Naze32 will be counted as Naze32
Data was taken in June 2017, multiple connections during single user session are stored as single entry. Read more...
-
GPS Racer: worklog #8 - sonar test platform
I honestly admit, that my 6" quad (codename GPS Racer) was never very pretty. It was just ugly with that GPS tower on the front. Today it got even uglier: I've equipped it with HC-SR04 sonar connected via I2C bus (ATtiny85 to the rescue).
Why, you might ask, have I done something so useless? Answer is simple: to make it less useless. There are at least few problems with sonar and modern flight controllers. First of all, most new boards does not have connections for it. Second of all, it does not work reliably.

It just don't. It was no unreliable that INAV, for example, disabled it for some time completely. Right now it is back, but used only during landing on multirotors. No terrain following or anything like that. Read more...
-
FC Soft Mount With Adhesive Pads FTW!
I will not try to proof if you should soft mount a flight controller on a racing drone. I will only say, that few months ago I was against it, but lately I changed my mind. Stronger motors, stronger magnets, more torque, more speed and out of nowhere, incredible amount of noise can be fed into gyro signal. Sure, this is not required, but motors, ESCs and battery will thank you when you soft mount flight controller. Less, noise, less restrictive filtering required, lower signal delay, better flight performance.
In most places over internet you can find either a rubber standoff or double sided tape solution. Sure, that works, but there is something better. Dedicated, double sided adhesive, vibration dampening pads. There are many sources, and many names. I'm using Sekisui brand. Check ebay, Amazon, HobbyKing. Look for gyro pads, vibration pads, vibration dampening. I do not want to advertise any particular seller, so you are on your own here.

-
AnyFC F7 and DIY buzzer for INAV
Because both original and Banggood clone of AnyFC F7 flight controller and missing buzzer support, its usefulness is somehow limited. There is no dedicated pin and driver. Next release of INAV (1.7.2) will finally solve this problem by reusing Motor #9 output as buzzer output.
But, some additional hardware will be required. To be precise, single n-channel signal MOSFET transistor like 2N7000. Connection diagram is shown below.
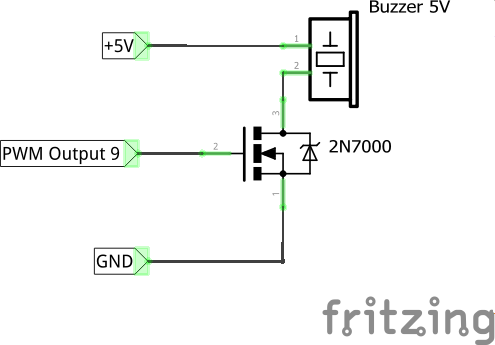
And this is how it can be soldered together.
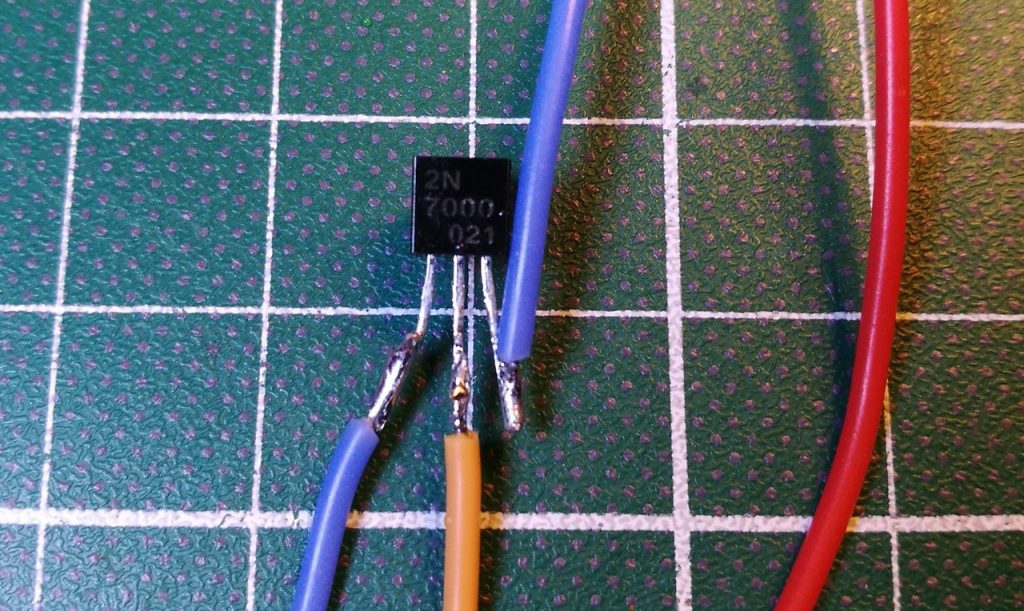
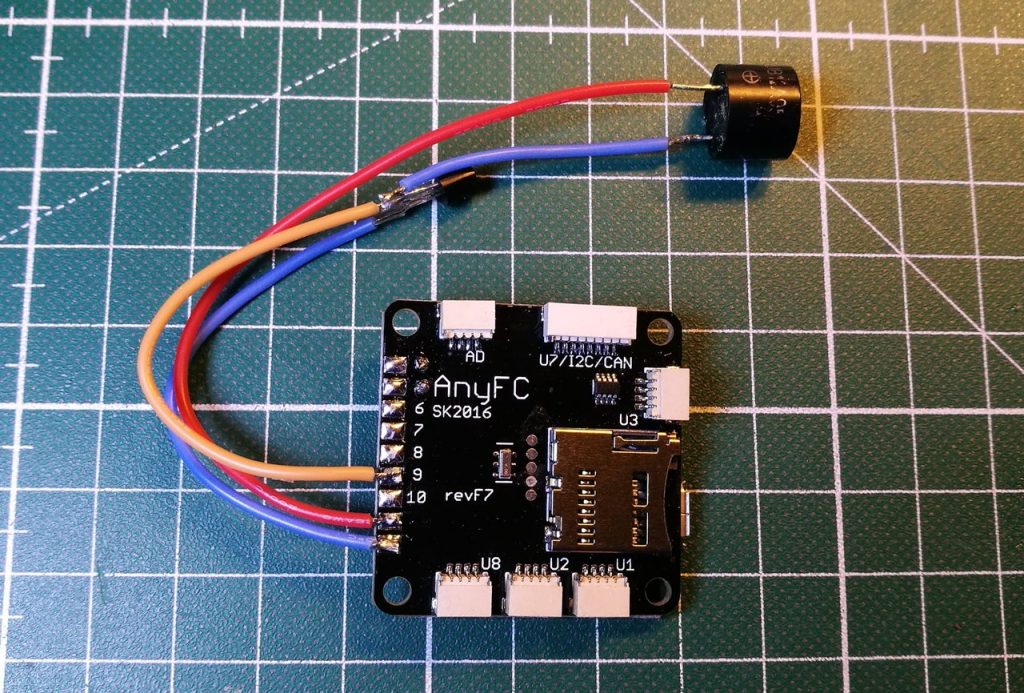
That is all. Simple, right?
Read more... -
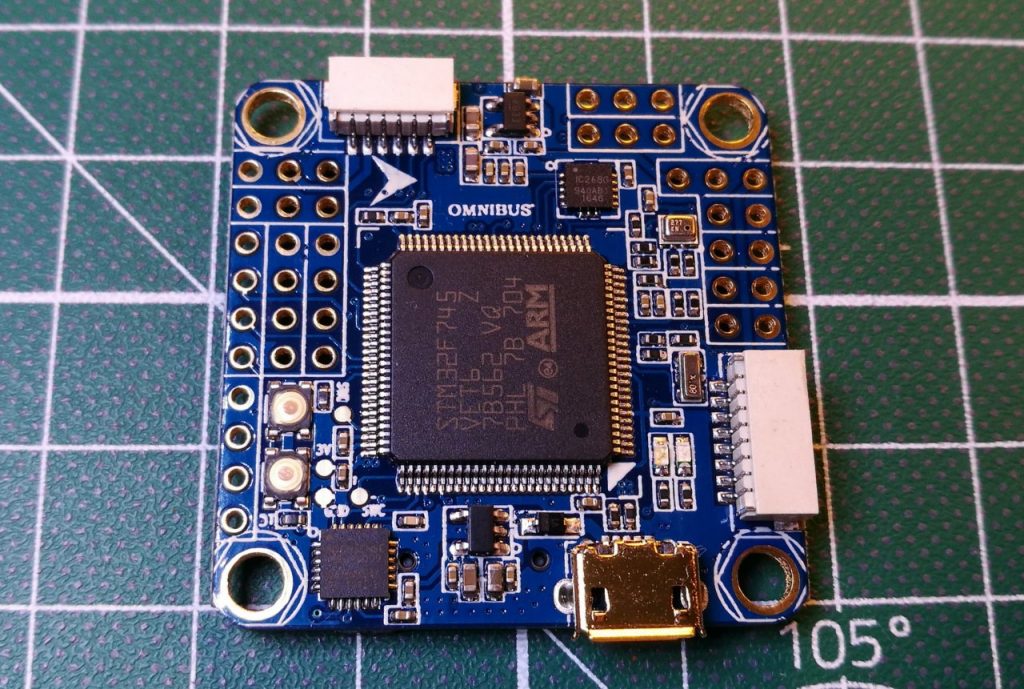
Hands on: Omnibus F7 Flight Controller
Thanks to Airbot I got my hands on a new STM32 F7 flight controller: Omnibus F7.
Before we proceed, small note.
I am a huge fan of F7 flight controllers. In a year, they will be a main line of high performance FC on the market. STM32F7 with built-in UART inverters solves so many issues STM32 F4 boards are facing. But, F7 are not there yet. Currently available boards uses STM32F745 CPU in 100 pin packages. They are just too big to comfortably fit 36x36mm format. You place CPU and most of the PCB is taken. Than means there is no space left for either connectors or OSD for example. What we are waiting are FC with STM32F722 in 64pin package!
-
Hardware revisions of Omnibus F4 flight controllers
Airbot Omnibus F4 series is one of my favorite flight controllers. Two of my quads are flying thanks to them. They might not be the best or the famous ones, but they get the job done. And that is what counts.

Unfortunately, they are not free of faults (and what is?) and each next revision is trying to fix some problems. Sometimes by introducing a new one. Right now, there are 4 hardware revisions, not always fully compatible with each other.
Here is a summary of all 4 revisions...
-
GPS Racer: worklog #7 - flying at night
Like promised, I took GPS Racer equipped with night vision camera RunCam Night Eagle and IR projectors for a night flight. And it worked. Not as good as I expected, but worked.
- RunCam Night Eagle is sensitive enough to fly at night. Just like that. As long as there is at least some light, you can fly. In my case, full moon and some residual light was fully enough
- IR projectors (3W in total) are underpowered. They help, but up to 3-4 meters. Not any further
- Propellers flooded with IR are so bright... I will have to look for some black props...
- OSD started to flicker out of the blue. I suspect new BEC for IR projectors introduces some noise. I will have to fix it somehow...
-
Pitot tube is coming to INAV
One of the things that INAV was missing, was a decent support for Pitot tubes, or more generally speaking, airspeed sensors. Autonomous flight, or landing, without knowledge about airspeed can easily lead to a stall. Stall can lead to crash. A crash leads to rebuild. Rebuild of big airplane is a nightmare. Although, for some time now INAV was able to use digital PX4 Airspeed Sensors (I2C, based on MS4525), but they are quite expensive and airspeed was only reported in blackbox logs. Not very useful, right?
Now, this is changing. Next release of INAV (1.8 probably) will bring at least support for much cheaper, analog, APM Airspeed Sensor based on MPXV7002 chip. Although some simple additional electronics (2 resistors to be precise) will be required, but this pitot tube should be available for all flight controllers with free ADC input (Current or RSSI). Fancy ADC remapping will allow to use any ADC without built in dividers (Vbat has dividers so can not be used) as pitot input.

More than that, INAV 1.8 will (or at least should) bring PID scaling according to airspeed for fixed wings. This should result in better handling on both low and high speed.
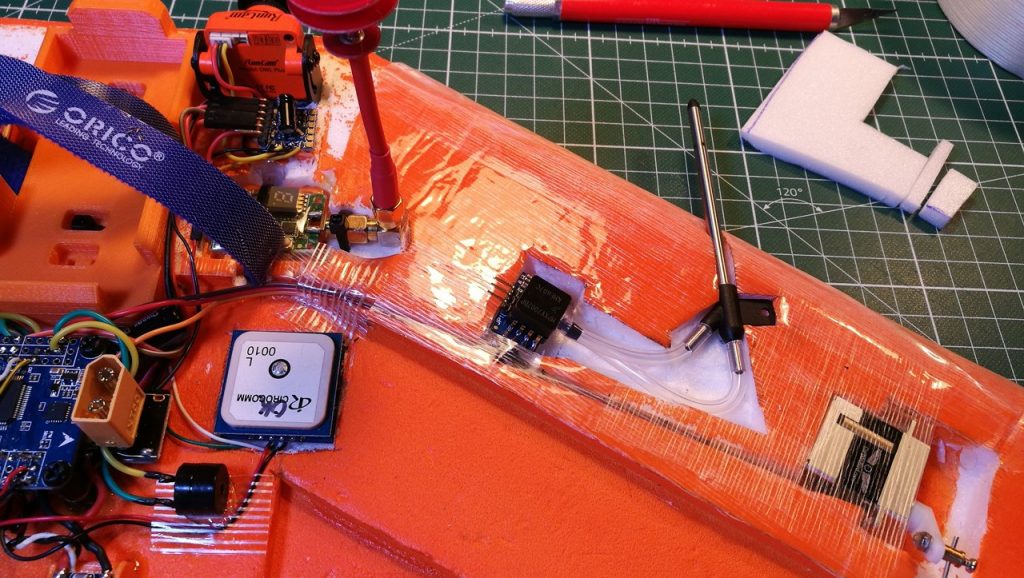
As you can see on the picture above, APM Airspeed Sensor is already installed on my small flying wing and is waiting for first flight tests this weekend. Logging only for now...
Read more...















I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: