-
GPS Racer: worklog #6
I have to admit, I have a talent for building ugly looking quadcopters and airplanes. But this is a step forward. This is the ugliest quadcopter I've ever seen... just look at it... So ugly, that almost beautiful...
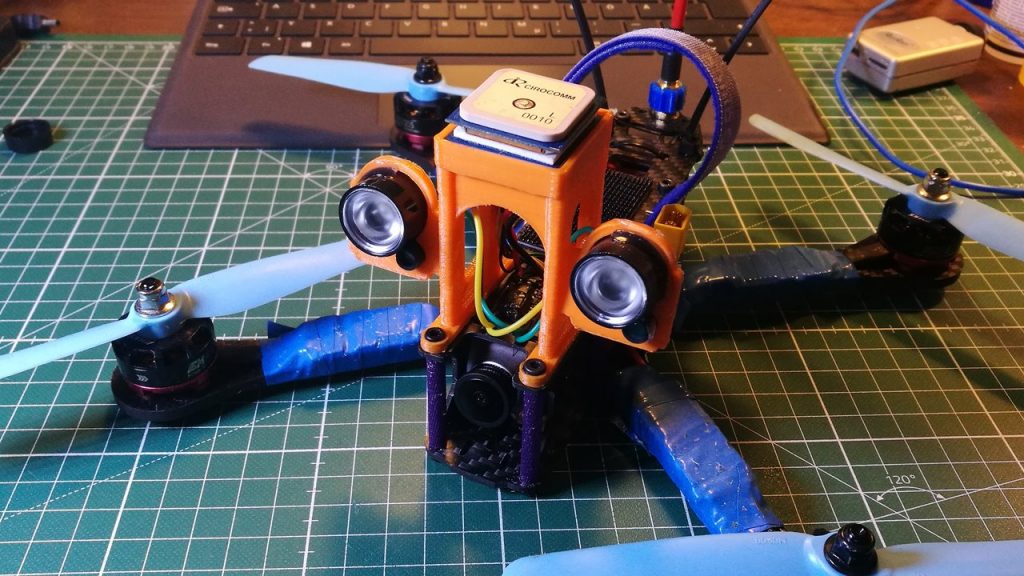
Those two "eyes" are IR projectors and that almost not visible FPV camera is RunCam Night Eagle... First flight this weekend!
Read more... -
Gyroscope and filtering video tutorial - Episode 3
In this episode I talk about:
- How to analyze Blackbox log for gyro noise
- How to find frequencies for gyro and Dterm notch filters in INAV, Cleanflight and Betaflight
-
GPS Racer: worklog #5
I've finally decided to make a decent use of my GPS Racer quadcopter. Until now, I mainly used it to test new things for INAV and that is more less all. RunCam Owl Plus FPV camera turned out to be non-flyable in the night, so I've decided to go one step further...
RunCam Night Eagle

Yes, RunCam Night Eagle. I've seen couple of video reviews of this camera on YouTube and decided that this is what I really need: a good night vision camera. Not a camera that can see after sundown. A camera that can see in the night!
Read more... -
USBasp driver for Windows 10 - Working solution
Yesterday I've spent like 2 hours fighting to make USBasp ISP programmer work under Windows 10 64bit. Seriously, that was like some kind of nightmare that turned into a comedy. All web pages that I've found suggested following procedure:
- Download zadig
- Install
libusb-win32 - Be happy
Unfortunately, in my case all attempts failed miserably. All I was getting from avrdude was
avrdude: error: programm enable: target doesn't answer. 1 avrdude: initialization failed, rc=-1I've found a solution. Internet was wrong.
libusb-win32was not the correct driver for USBasp. The correct driver waslibusbK (v3.0.7.0). After installing libusbK USBasp came back to life!
Read more...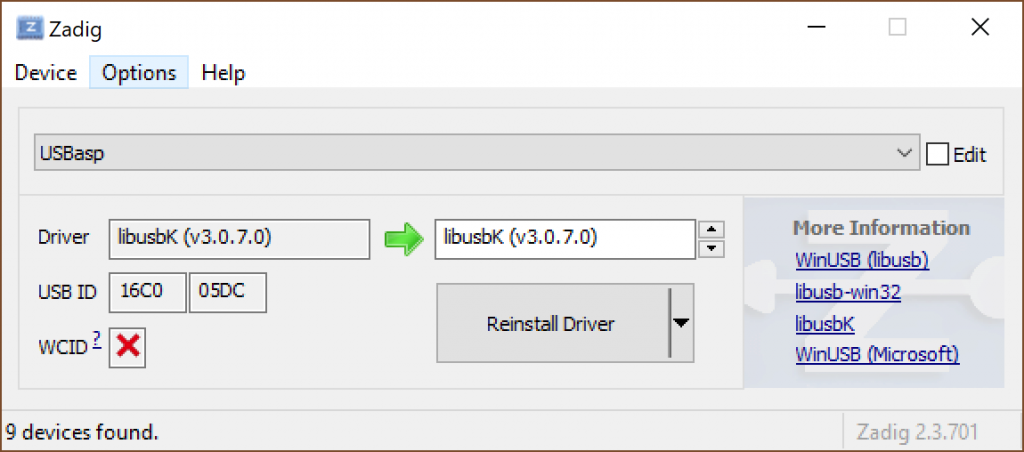
-
Depron Airboat Worklog #2
Next week passed and Depron Airboat is almost ready. Almost, since it still needs some finishing and I'm missing a BEC. Turned out that total power usage of one 9g servo and FrSky X4R receiver is slightly too high to just use single LM7805. 350mA during servo movement means more that 2W of heat (
(12-5) * 0.35) over single LM7805. Too much, so I will have to scavenge old models for still functional step-down converter.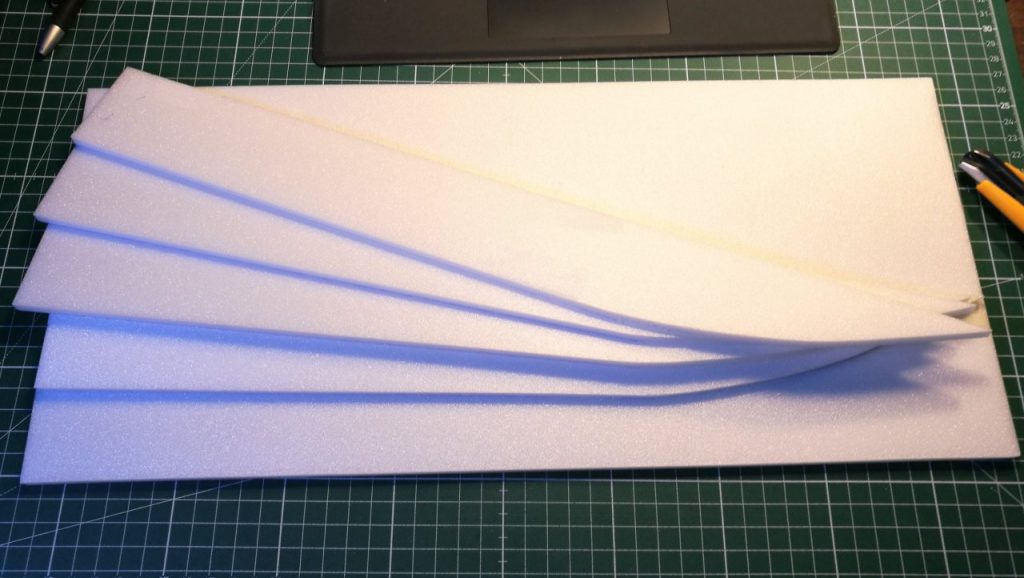
Hull made from 6mm Depron is now glued together using Uhu Por and polyurethane wood glue. It measures 18x8x2 inches. I've put my 3D Printed propulsion and steering system on it and did first static test.
It works. First water tests next week.
Read more... -
AnyFC F7 and a missing baro problem
When Banggood decided to "forget" about MS5611barometer in their version of AnyFC F7 flight controller, they not only did not mounted MS5611 on it. They also made usage of any external barometer on that board almost impossible to use.
Why? Long story short: all STM32 MultiWii derivatives are unable (yet) to lookup for I2C devices across different I2C buses. So, if we define barometer to be connected to I2C bus #4, firmware will look to barometers only on I2C bus #4. But, since many boards uses multiple I2C buses, this creates a problem: AnyFC F7 onboard (and missing) MS5611 is connected to I2C bus #4, but I2C bus available on JST connector in I2C bus #2.

While for Betaflight this is not a problem (BF pilots rather do not use barometer), it is a problem for INAV. AnyFC F7 target is unable to use any barometer if onboard MS5611 barometer is missing. OK, you can just solder one in place, but without hot air station and decent soldering skills this is not a good idea after all. This is why, until better solution is found, INAV will include ANYFCF7_EXTERNAL_BARO target. The only difference between ANYFCF7 and ANYFCF7_EXTERNAL_BARO is barometer support.
If you have MS5611 in place (soldered in or bought with one) or do not intend to use any baro, you should use ANYFCF7 target.
When you do not have onboard MS5611 and want to use external barometer (MS5611, BMP180/085 or BMP280) you should use ANYFCF7 and ANYFCF7_EXTERNAL_BARO target.
Until new official version of INAV is published, you might use this custom hex:
Read more...
INAV_1.7.1_ANYFCF7_EXTERNAL_BARO.hex. It is based on INAV 1.7.1 and proven to detect external barometers via JST connector. -
Hands on: DemonRC NOX5 FPV 5" Frame
So many things to do, so little time... I've purchased DemonRC NOX5 quadcopter frame more than a month ago, but had some time to take a look at it only today. This is not a cheap stuff. More than a $100 for a 5" frame is few times more than I've used to pay. But I just had enough of cheap chinese frames. Don't get me wrong, they usually fly alright, but both quality and user friendliness lacks a lot. With "premium" frame at least I'm sure that I'm getting a good quality carbon fiber and someone actually thought for a moment about "tiny" details a place for VTX transmitter or battery strap...
So, please welcome DemonRC NOX5:
-
Hands on: CarbonBird.com CB215MG Fast Digital Servos
What is the biggest advantage of cheap servos? They are cheap. What is the biggest disadvantage of cheap servos? Well... everything else. Do not get me wrong, for last 2 year all my airplanes and other contraptions have been running cheap analog servos. Some better, some worse, but all were cheap. And I always felt that one can expect more from a servo...
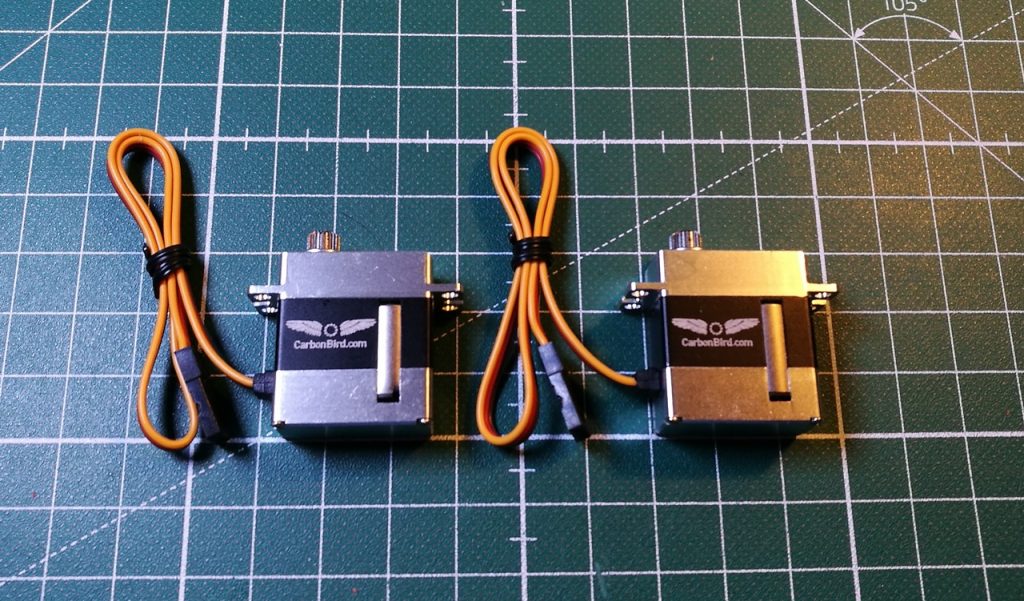
Thanks to CarbonBird.com I will have a chance to find out. They provided me with a pair of CB215MG fast coreless digital servos woot woot. I do not know much about servos, but they surely looks solid and reliable. Metal casing, metal bearings and 333Hz refresh rate. I'm just putting them on my latest flying wing and I will know if good servo is really worth it. I really hope so!
Read more...
-
Depron Airboat Worklog #1
One of my first DIY RC projects was a Depron Airboat I've build almost exactly 2 years ago. 12x6x2 inch hull, motor, servo, rudder and ESC. And honestly, I loved it. It was a great fun playing with it. Too bad, it did not survived very long. It broke in a middle of a lake and I decided my live is worth more. All I have left is a video
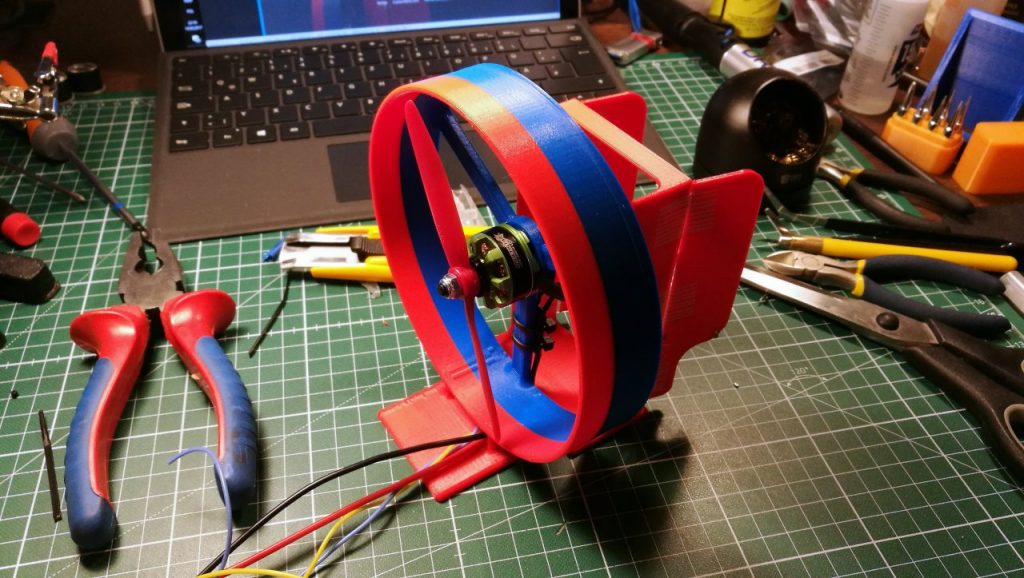
This season I started to build another Depron airboat. Slightly bigger, heavier and with more power. And partially 3D printed. Hull will be made from Depron, but propulsion and steering system will be (is) printable.
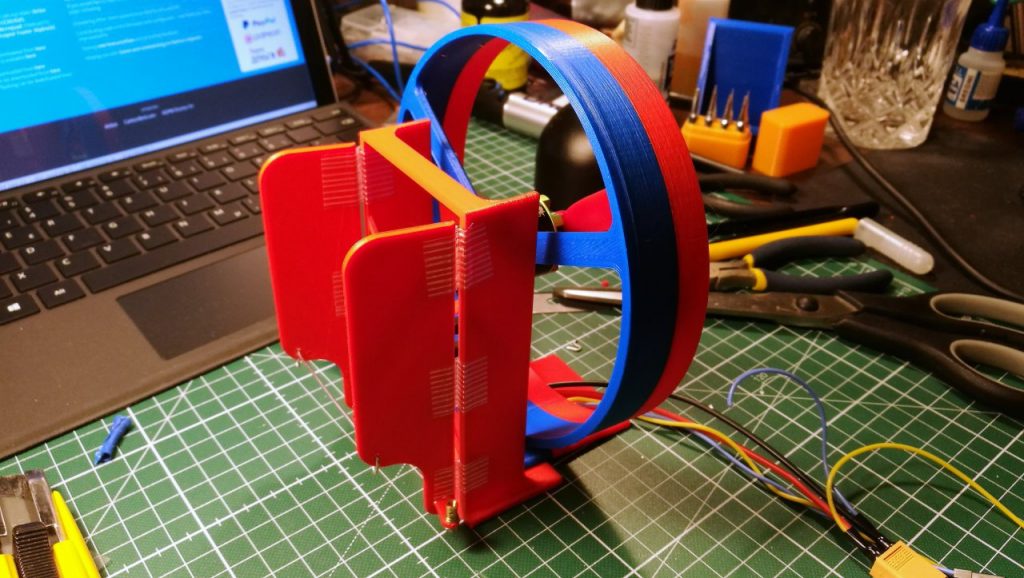
After few hours of printing time, propulsion and steering is done. What is left is to make a hull. 18x8x2 inches made from 6mm Depron. I might cover bottom with glass fiber and impregnate with polyurethane wood glue diluted with alcohol.
New thing will be a reversible ESC. I've already configured and tested FVT Littlebee 20A to act as reversible ESC and it seem to be working like expected. I only wonder how effective rudder will be when on reverse. Not much I effective probably...
And yes, STL files will be available when this is proven to be working. Everything for the community :)
Read more... -
The best way to mount RC antennas on a drone
Today another tutorial video I recorded some time ago: how to install RC antennas using zip ties and heat shrink tubes. After all, dangling antennas will be chewed by propellers in a minutes.
Read more...











I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: