-
Crossbow LRS: this one did not went well...
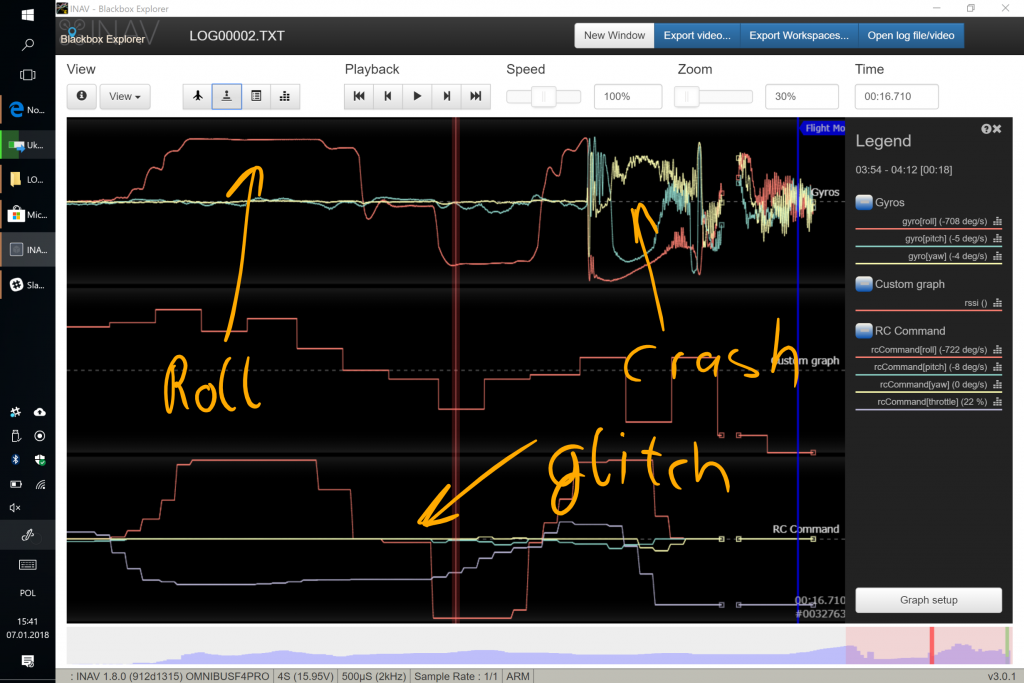
Sometimes you win, sometimes you lose. This time I've lost. Not by much, but always. During testing of my DIY LoRa RC link, radio caught a glitch during a flip few meters above a ground. It was not even a failsafe situation. Link recovered a few milliseconds later, but it was too late and quadcopter crashed into the ground.
During a roll, while being behind a tree, RX antenna got hidden behind a carbon fuselage and both antennas were at 90 deg. That was enough.
Damage is not severe, nothing I can not 3D print in one evening. It's more like a discredited honor or something.

The glitch was so short that is was not even recorded in blackbox log. RSSI was fine, no locked rcData. Quadcopter just kept 90deg attitude for too long.
There is a slight chance it was not faulted in software or hardware. Maybe there was a strong rouge TX polluting the aether. Why? I've caught a failsafe on a different quad (2.4GHz FrSky link) while being only a few meters away and a friend caught a failsafe on a TBS Crossfire. So maybe it's not entirely my fault after all.
Read more... -
3D printed racing drone, part 2
My 3D printed racing drone is done. More or less. I was able to finish it a few weeks ago and even perform a maiden flight. It survived the experience, but I also discovered few problems I will have to solve before officially calling this project a success.
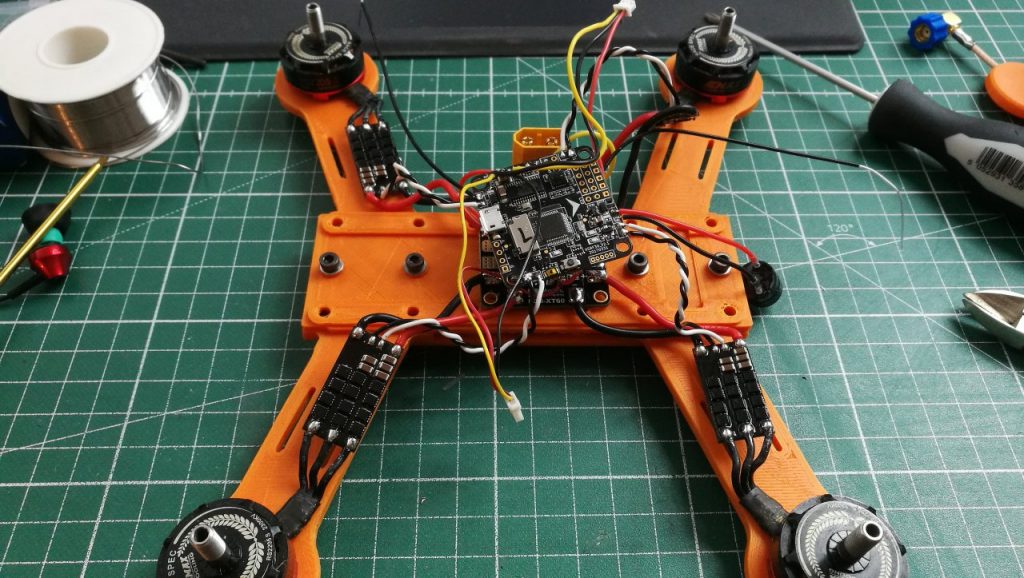

First of all, the decision about hard mounting a flight controller and not installing a capacitor on mains was a bad one. Not only motors are "twitching" from time to time, a video is very noisy. I hope big low ESR capacitor will solve that, since there is no way for soft mounting for this frame.
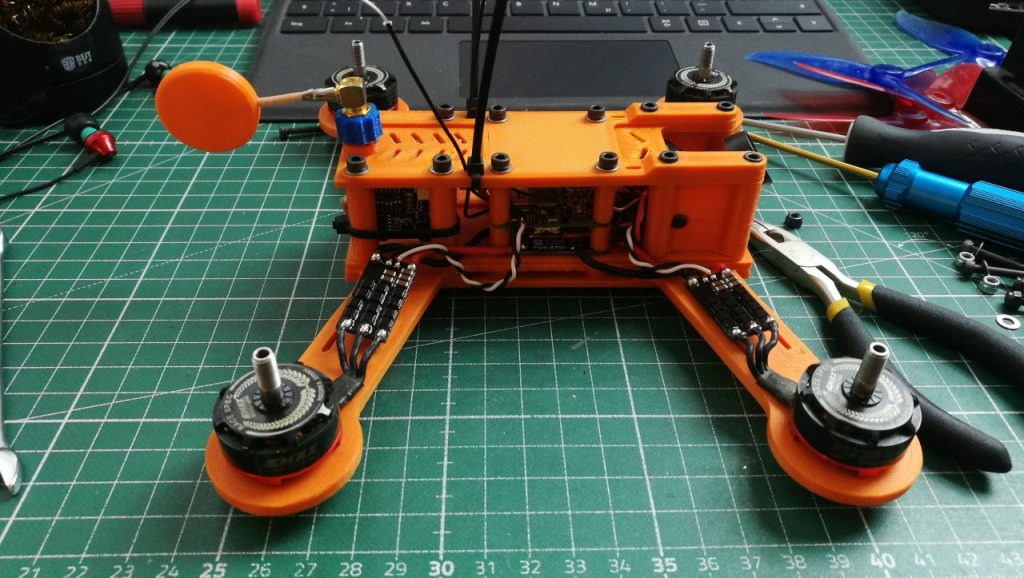
Besides that, it worked just fine. I will try to prepare a video from the maiden flight in a few day, for now only a few pictures and final specification:
- Frame: PLA 3D Printed, 220mm motor-to-motor diagonal
- Motors: EMAX RS2205S 2300KV
- ESC: Racestar RS30A BLHeli_S
- Flight controller: FrSky XSRF3O running Betaflight 3.2
- VTX: TS5823 200mW
- Camera: RunCam Swift
- Total weight, no battery: 380g
Total build is, of course, heavy, but not that heavy as I feared. I was expecting something way above 400g. The frame is also quite stiff. I wonder how much beating it will be able to take....
Read more...
-
Crossbow LRS: ready for next tests
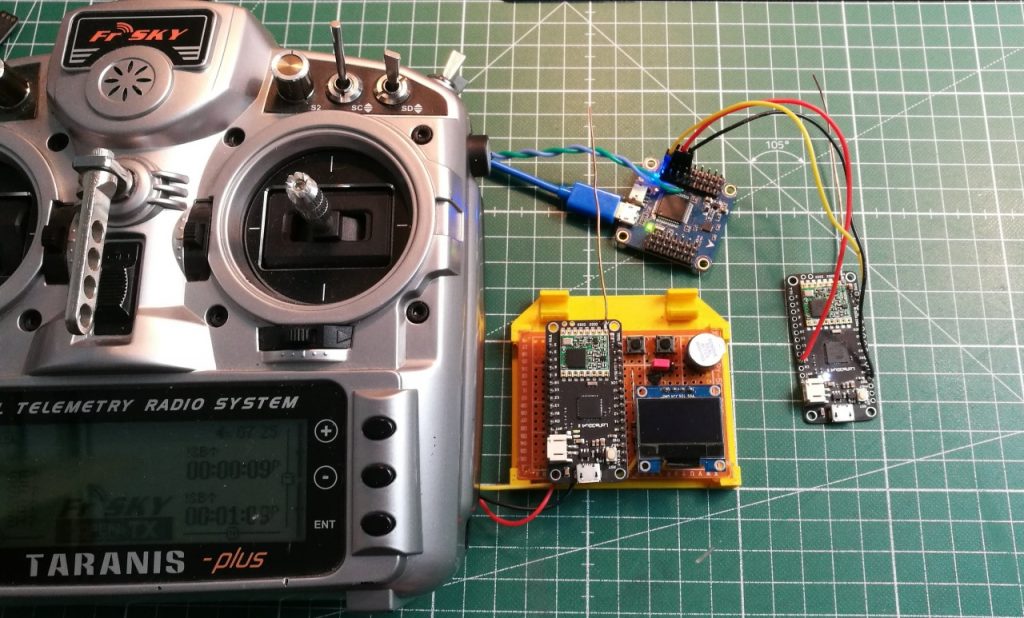
Looks like I was able to solve all major known problems with my DIY long range radio system Crossbow. I'm writing known, since no idea what lies beneath… Anyhow… What changed? Quite a lot:
- I've extended Arduino-LoRa library with ability to transfer full packet in single SPI transaction. Right now, each read of write to SX1276 uses single transaction. Previously, there were 2 transactions per byte…
- The same library now has ability to send packets in async mode. Previously it was blocking code execution until LoRa packet was transmitted. Huge waste on processing time
- With OpenTX 2.2.1 on the loose, I was finally able to drop PPM input from Taranis to TX module and replace it with S.BUS. But not without problems. According to specification, S.Bus should be
SERIAL_8E2. But my Taranis clearly outputs it asSERIAL_8N2 - For now, OLED display is disabled. It was taking too much time to update it using I2C and TX module was loosing S.Bus packets
- I've improved RC channels processing time, time required for encoding/decoding went down by 1ms
- It is still LoRa32u4 II 868MHz based but I'm considering different hardware. For example ESP32 with LoRa. Time will show
Next test hopefully this weekend. If weather allows, of course. We have very wet autumn this winter in central Europe this year...
Read more... -
Worth to see: 250m inside of a chimney in a FPV drone
I'm posting this not without a very specific reason. A few days ago one of my friends accomplished something quite amazing: he "dived out" a 250m tall chimney of an abandoned factory. By "dive out" I mean: flew inside a chimney at its base, climbed 250m up inside the chimney and then flew out. Simple, right? Well, no :) Just think of it like this: how to get a solid video link when TX is 250m away inside a structure made from reinforced, thick, concrete?
I'm waiting for a video of "dive in" for sure!
Read more... -
The most popular flight controller for INAV - Q4 2017
It's been a few month since, for the last time, I presented to you the most popular flight controllers used together with INAV firmware. So, as you can suspect, it is time for the next one. This time, I've looked into last 3 months of the year 2017: October, November, and December.
Important, this is not the number of boards flashed with INAV, but rather the number of times a board was connected to Configurator!
This counts TARGET software name, not retail name. For example, all clones of Naze32 will be counted as Naze32Board name Q4 Share [%] Gain/Loss comparing to Q3 [pp] SP Racing F3 22 -4 Omnibus F4 Pro 18 +3 Naze32 15 -5 Omnibus F3 11 -1 Omnibus F4 v3 8 +5 Omnibus F4 v1 4,5 +0,5 Matek F405 4 +3,5 SP Racing Evo 3 -0,5 CC3D 3 -0,5 Revolution 1 -0,5 Remaining 10% of market share is distributed among other targets.
As you can see, Omnibus F4 series dominates. All revisions of this board have 30,5% share when combined. Also, all F3 and F1 based flight controllers are giving ground to much more powerful STM32F4. To compare, in August 2017, all F4 boards had 25% when combined. Right now they have 39% market share when combined. And this is good!
CPU Family (TOP 10 only) Q4 Share [%] Gain/Loss comparing to Q3 [pp] STM32F1 20 -6 STM32F3 40 -6 STM32F4 40 +12 Another good news is that share of OSD equipped flight controllers is also growing. In August 2017, 47% of boards were equipped with OSD. Now it is 50,5%.
Read more... -
How to wind an electric brushless outrunner motor with dLRK winding schema, part 2
My memory is not as good as it used to be. I just realized, that third part of my motor winding series was not yet announced over here. So here we go...
In this video I terminate motor into Delta pattern and do first test of freshly winded motor.
Read more... -
LoRa versus FSK modulation signal spectrum
LoRa modulation has some advantages. Like superb receiver sensitivity and immunity to interference. Has some problems, true, but at the end, it's a great way to send small packets of data to long ranges using low power.
Anyhow, today only one picture: how LoRa spectrum compares to FSK signal spectrum? Like this:
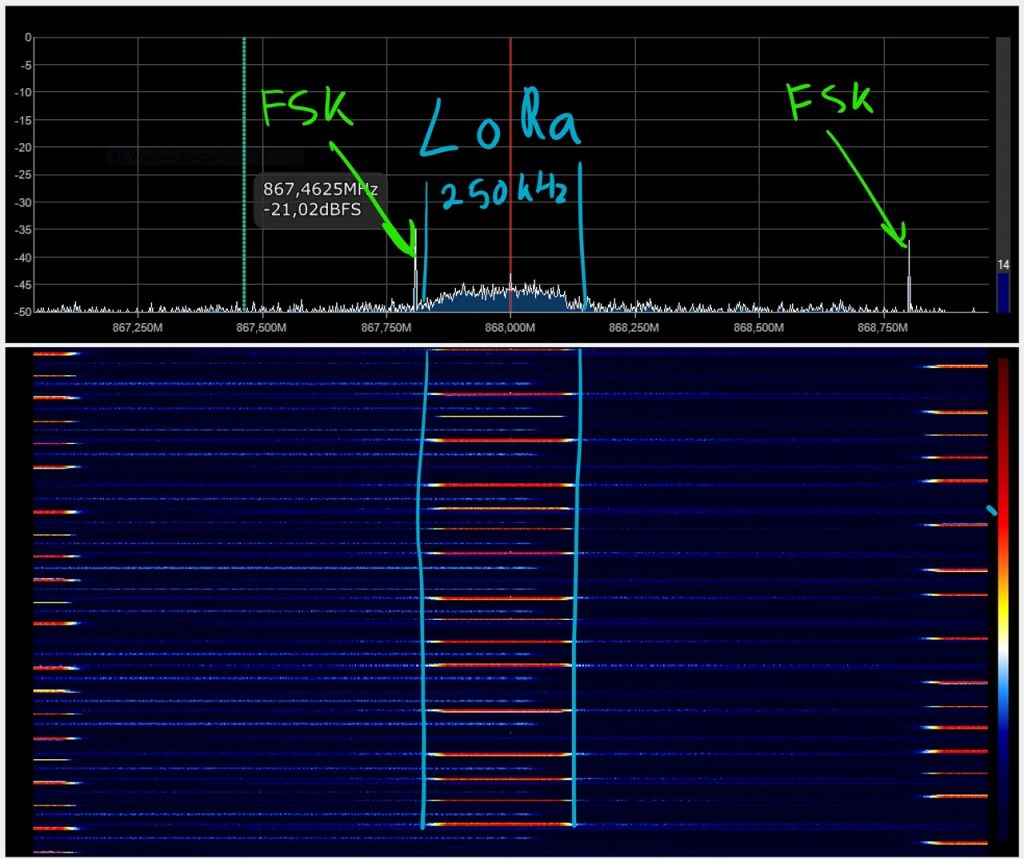
Those two peaks are nearby FSK stations, while plateau is 250kHz wide LoRa signal. Difference is at least clearly visible ;)
Read more... -
Crossbow LRS: first live test that is almost a success
Finally, much later than I originally expected, Crossbow LRS, my DIY medium range RC radio link was used to control something that flies. Not much, and not far. It was only my experimental 6" GPS Racer quadcopter. And I reached only 350m. Small steps, I had no intention to beat and records after all.
Just as reminder, by RC link is as follows:
- Based on LoRa32u4 II development boards
- Semtech SX1276 868MHz
- Programmed with Arduino
- Planned range: up to 5km
Next test, this time without twitching, in a few weeks.
Read more... -
CC1101 868MHz Wireless Transciever Pinout
CC1101 is another example of modern radio modules. I might not have the receiver sensitivity or LoRa SX1276, but with proper antennas should give more than 1 km of radio transmission. Recently I got a couple of them, so expect some new projects with CC1101 and Arduino.
Now, something that took me some time to find out, so you will not have to: CC1101 pinout:
Read more...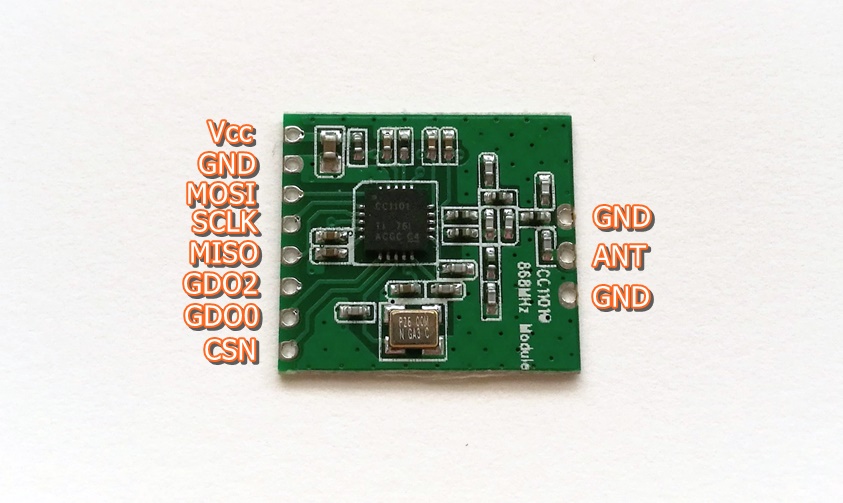
-
RaceFlight One GPL violation drama, there might be more of that
Previous parts of this cycle are available here and here.
Betaflight community has a grudge against RaceFlight. And they have a reason. Two potential, or maybe I should say confirmed, GPL violations in one year is fully enough. That just does not looks good no matter how you look at it. This whole situation stinks. So it's not a surprise that what leaked as RaceFlight One source code is analyzed like crazy.
Latest news: RF1 code might have at least 2 potential license violations:
STMicroelectronics license violation
* @attention * * <h2><center>© COPYRIGHT(c) 2016 STMicroelectronics</center></h2> * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission.If RaceFlight do not have an agreement with STMicroelectronics, point 2 is violated since
binis the only way RF1 is distributedAtollic TrueSTUDIO(R) license violation
** Environment : Atollic TrueSTUDIO(R) ** ** Distribution: The file is distributed �as is,� without any warranty ** of any kind. ** ** (c)Copyright Atollic AB. ** You may use this file as-is or modify it according to the needs of your ** project. Distribution of this file (unmodified or modified) is not ** permitted. Atollic AB permit registered Atollic TrueSTUDIO(R) users the ** rights to distribute the assembled, compiled & linked contents of this ** file as part of an application binary file, provided that it is built ** using the Atollic TrueSTUDIO(R) toolchain.One more time, if RF do not have separate agreement with Atollic, they are violating license above. I have not seen information that RF1 was built with Atollic TrueSTUDIO(R) toolchain.
I will leave it without any additional comment.
Read more...











I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: