-
What is a PID controller and how it works?
The whole FPV hobby, and especially multirotor drones, work only thanks to control theory and PID controllers. They are the only thing that separates chaos and immediate flip-over from a stable flight. A regular multirotor has at least 3 PID controllers. If you enable any mode with self-leveling, the number goes to 6. Any GPS assisted mode increases the number to at least 12.
Of course, the PID controllers we think when we think about when we say about multirotors, are Rate PID controllers. They keep our drones stable by keeping angular velocity at desired levels. And usually, they are the ones that have to be tuned to achieve a nice, smooth and stable flight.
-
A very cool, futuristic looking, 3D printed quadcopter frame
I love this part of me being a creator and an influencer, where I can show you some amazing things created by other people. And today, the joy is double, because it is an extremely cool frame designed by a guy from Spain that goes under the nickname of Micrathene FPV.

What it is? Well, like I mentioned, it is a fully 3D printed 3" FPV frame with a place for a GPS, FPV camera and (yes, I'm not joking on that) camera tilt! There is enough space inside for a servo and a camera mount is pivoting by default.

-
Betaflight vs EmuFlight vs INAV
Which flight controller software flies better out of the box? You know, the stock, default settings, no tuning. Just flash and fly. Betaflight, INAV or maybe EmuFlight? I decided to test it on one of my 5-inch FPV drones and compare: Betaflight vs INAV, Betaflight vs EmuFlight and EmuFlight vs INAV.
The results are divided into 2 separate videos. In the first one, I explain all the rules and present all 3 flight controller software flying the same kwad.
-
What is EmuFlight?
Here is a short story of what is EmuFlight, how it differs from Betaflight and should you even care?
To answer the question. Yes, you might want to take a look at it. It is different enough from Betaflight to consider it as a separate flight controller. And some people say it really fly great...
Read more... -
EmuFlight and INAV Matrix Filter
Matrix Filter will have its premiere together with EmuFlight 0.3.0 and INAV 2.5. Which of those two will happen first is still unknown. After originally developing Matrix Filter for INAV, I also ported it to EmuFlight code and already some time ago they accepted my code proposal and merged it.
You have to admit, that the name is quite catchy. Matrix Filter for sure sounds very sci-fi. It's not that sci-fi tho. It's just an evolution of dynamic gyro notch filters known from Betaflight for quite some time. Instead of having a one-dimensional filter structure, it is a 3x3 filter matrix that works like this: Read more...
-
A brief history of a flight controller - From MultiWii to Betaflight and beyond
I will tell you the history of probably the most successful family of Open Source flight controllers: MultiWii that continues its life today as Betaflight, EmuFlight, and INAV. Other families like OpenPilot were not that successful and practically died. On the other hand, the history of ArduPilot is not that interesting and we can leave it for the other time.
Wii and Arduino make MultiWii
Believe it or not, but it all began with a Nintendo Wii controller: Nunchuck. Why? It was the most obvious source of gyros in the early days. You pry open one Nintendo Nunchuck, get gyro out, connect it to Arduino, flash it with MultiWii and you have made you your very own DIY flight controller. Yeap, the "Wii" in MultiWii was taken from the Nintendo Wii itself. If DIY was not your thing, you always had the option of buying ready boards like KK for example. Read more...
-
INAV on rovers, boats, crawlers, tanks and other ground vehicles
What can INAV do? Well.... it can fly your multirotor drone and a fixed-wing airplane. And it can do it pretty nicely! Unfortunately, that is all it can do. Now, at least.
Every year or so, I'm building an RC airboat and always wanted to build a rover based on some kind of an RC crawler. Running those things without any flight controller is more than fine, but I always wanted to have at least RTH capability. You know, when something happens a few hundred meters into the lake and you really do not want to swim there to recover the boat. And no, you really do not want to do it. Read more...
-
Was I disqualified from Betaflight?
The best way to fight with haters and different types of fanboys with whom you do not agree with is to ignore then. Just like that: do not feed the trolls, it makes no sense. Sometimes, tho, it's so hilartious... Like today I learned that I was disqualified from... Yes, from what? Betaflight? Some other privilege I'm not aware of?
Oh, one day I will find the best screenshots from late Butterflight Slack... oh boy, that was interesting read :)
Read more... -
FrSky ACCST 2.0.0 "important" firmware update for all receivers, radios and transmitters
FrSky does not sleep, or rather woke up, and after years of not touching the topic, released an "important" update of ACCST 2.4GHz protocol for all the compatible 2.4GHz receivers, transmitter modules, and radios: X9D Taranis, Q X7 Taranis, X10/X10S Horus, X8R, X4R, X4R-SB, XM, R-XSR, XJT and so on.
What changed in ACCST 2.0.0? According to FrSky, they fixed some kind of a bug with uncontrolled servo movement in ceratin conditions (probably almost never) and improved "correction and verification".
What does it mean in the real world:
- ACCST 2 is not compatible with previous ACCST
- if you decide to upgrade, you will have to upgrade receivers and transmitters. All!
- any 3rd party ACCST compatible receivers and transmitters stop to work: including multiprotocol modules and 3rd party D16 receivers
Consumer advise? Do not update! There is no need to update from ACCST to ACCST 2.0.0. Looks like there is no gain for end users at all and the cost is substantial!
Read more... -
FrSky R-XSR pinout
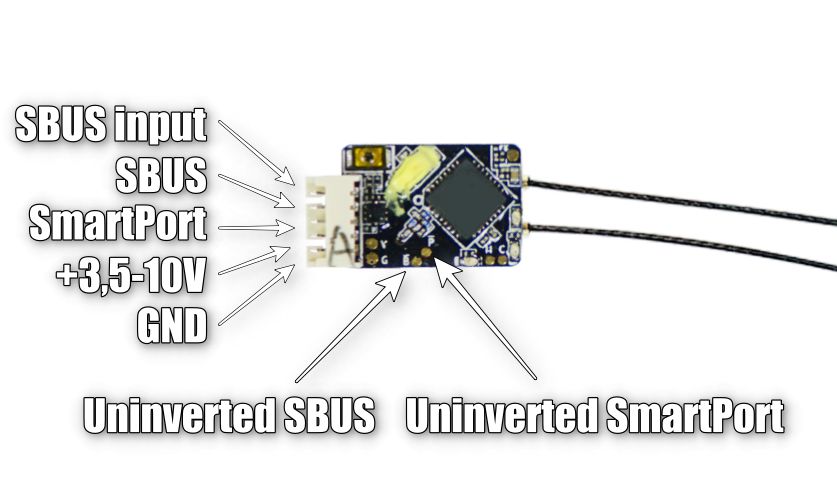
- GND - ground wire
- +3,5-10V - positive voltage supply. R-XSR is rated up to 10V and powering it from 5V is the best option
- SmartPort - inverted S.Port pin (standard) - can be used directly with STM32F3 and F7 series
- SBUS - SBUS protocol output
- SBUS Input - for redundancy function only
- Uninverted SmartPort - uninverted S.Port pin (standard is inverted) - can be used directly all flight controllers on any serial port
- Uninverted SBUS - uninverted SBUS protocol output (standard is inverted)





I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: