-
Project Dualcopter - worklog #1
Flying season 2016 is slowly coming to an end on northern hemisphere. That means less time spent on an airfield and more time spent behind a desk. For this autumn I've found a very interesting, small project: Dualcopter.
Dualcopter is an UAV with two coaxial contra-rotating propellers and 2 control surfaces driven by servos. Lift and yaw are controlled by propellers, while pitch and roll by ailerons placed below motors. This video illustrates how it looks like:
My Dualcopter will be slightly different. Instead of foam and wood I will use 3D printed parts connected together CA glue and zip ties. Maybe it will not be super strong and probably will not survive any crash, but should be enough to make it fly for a minute or so. Almost all parts would be either 3D printed or taken from spare box. I'm not planning any new purchases.
Planned specs:
- Motors: Turnigy MT2213 935KV
- Props: APC 1045 MR
- ESC: Afro 20A
- FC: Flip32 probably with INAV inside
- Battery: 1300mAh 3S
- Weight: around 800g with battery

So far, after 2 evenings I have this:
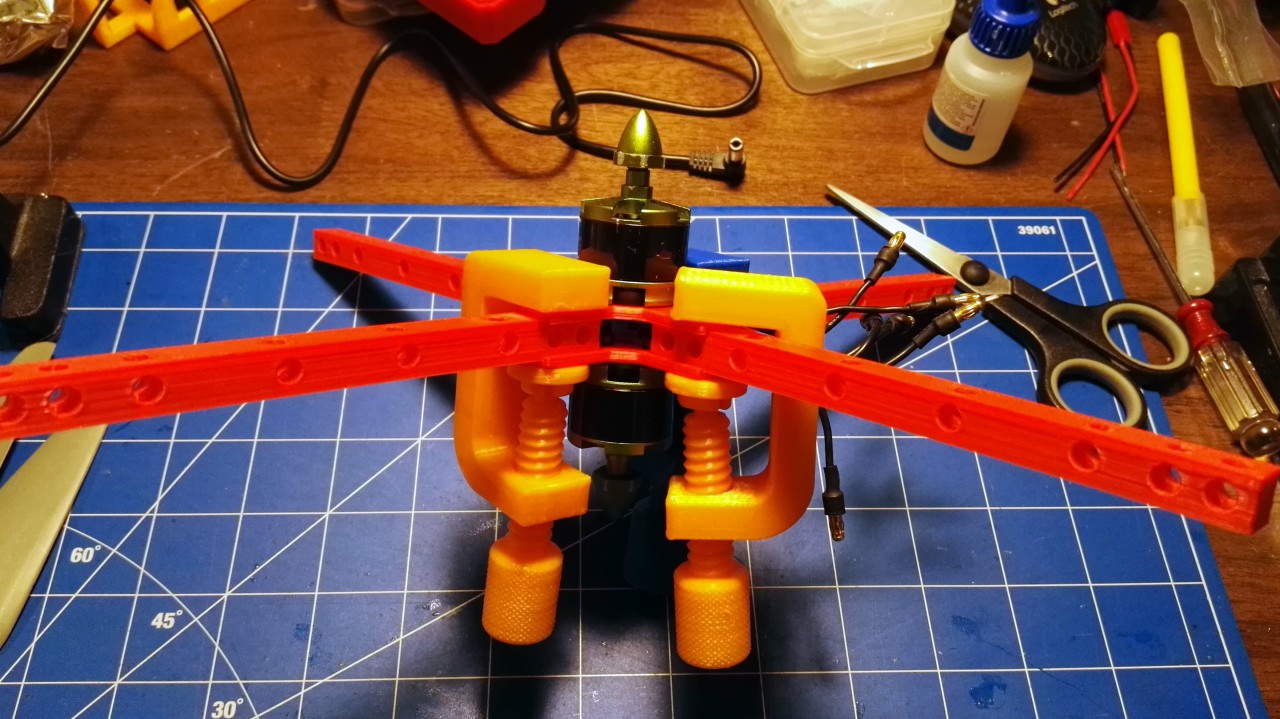
Two motors mounted on a frame.
Next step would be to build bottom section with ailerons and battery compartment.
Read more... -
3D Print Timelapse Video
Few days ago I've decided to do something new: timelapse video of a 3D print. It's kind of fascinating to watch extruder places layer after layer of molten PLA... too bad it's taking so long to print something bigger...
- Printer: Malyan M150
- Thing: 35 deg RunCam HD / Mobius stand for mini-quads
- Filament: PLA
- Speed: 50mm/s
-
Hands on: DALprop T5046 propellers
Last weekend I had an opportunity to spend some time in the air with new DALprop T5046 propellers from Surveilzone.
They are "funny" propellers. On one hand they have some nice features, on the other, they have few flaws that almost disqualifies them in my eyes...- Pros
- Good air "grip"
- Good efficiency
- Smooth flight
- Nice speed
- Cons
- Oh man, they are fragile. Each crash equals at least one broken propeller. If you got used to "tough" props from DAL, you will be shocked
- They are very, very sharp at edges. I've cut my fingers when I was unscrewing shaft nut. You either have to hold them very carefully or wear gloves?
- Too flimsy. I was afraid that they will bend in flight and cut ESC. I've already lost 2 ESC because of flimsy/bendy propellers and I started to pay attention to "flimsiness"

Final conclusion: while they might be an interesting option in terms of performance, they are not prepared for everyday use!
Photo from Surveilzone
Read more... - Pros
-
Tip: how to secure XT60 plugs
I had a problem with my SkyZone goggles: I was constantly breaking battery cable near XT-60 plug. One not careful enough grip and cable was ripped away. I've decided to fix it and permanently secure the cable with epoxy glue.
Sure, I could use hot glue (that looks ugly) or Sugru (that is expensive), but since few weeks ago I've bought HobbyKing Mid-Cure Epoxy glue, I've decided to use it instead. It worked fantastically!

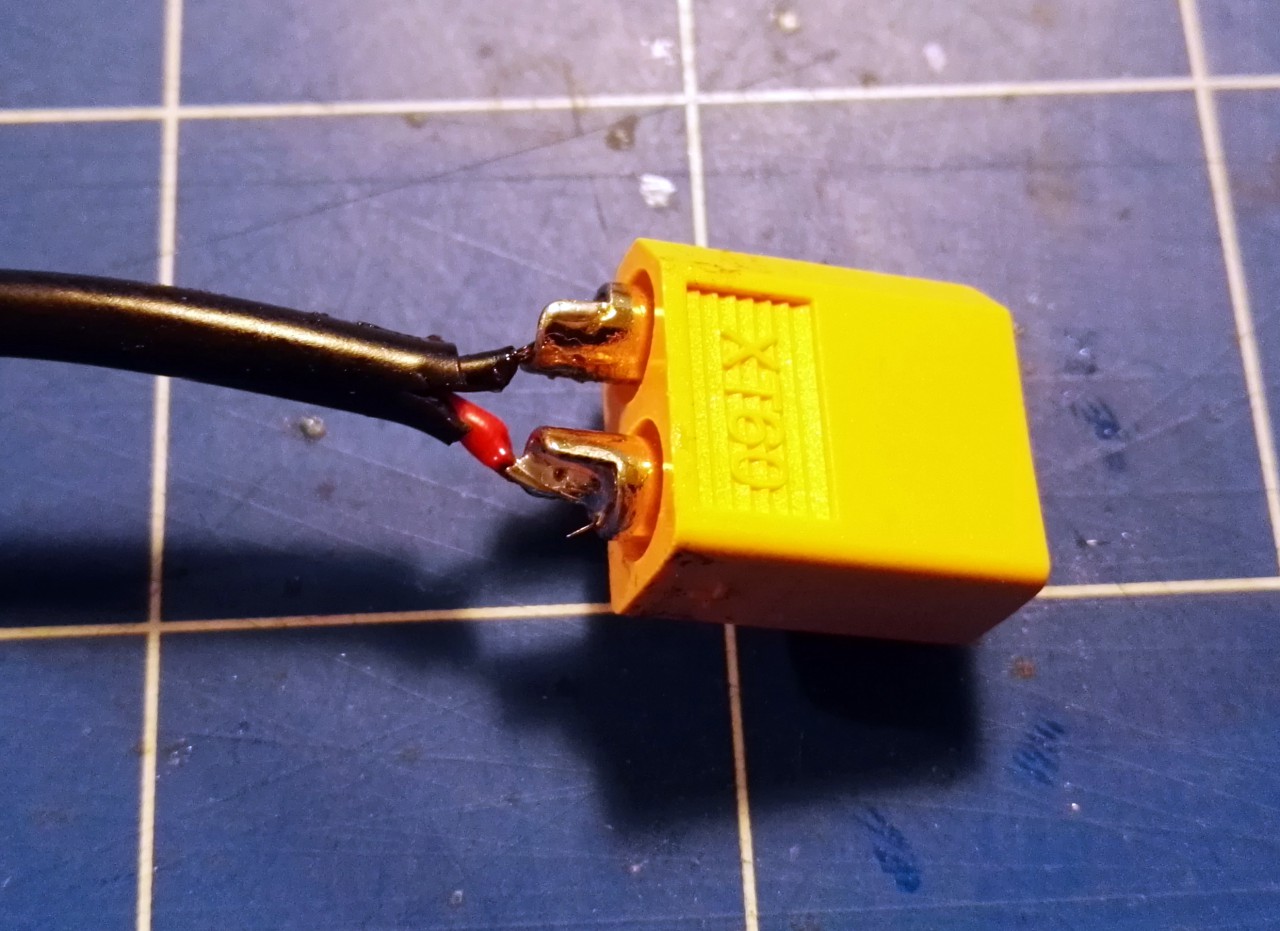
Solder cables to XT-60 plug pretty close to external coating as possible.
Now, prepare a "mold" using electrical tape. Just wrap it around plug and cable leaving empty space inside. Prepare epoxy glue and pour it into "the mold".
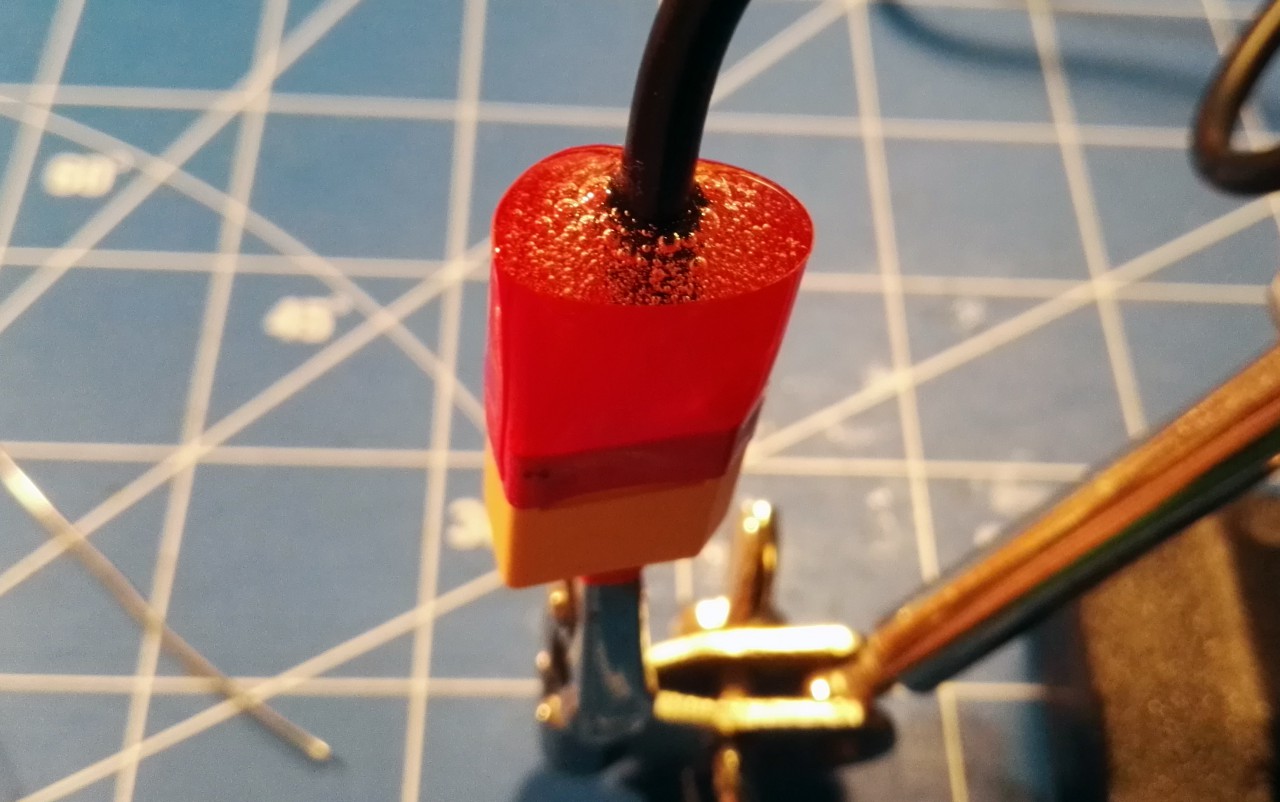
After and hour or so, epoxy glue will be hard enough, that electrical tape can be removed. There is no chance I could ever rip this cable from the plug by accident!
Read more...
-
INAV is learning to do mini-quad racing too
Let's be honest: in terms of mini-quad racing there is Betaflight (probably also Raceflight but I've never flew it yet, so will not comment on its flight performance), long long gap, and then it's everything else including Cleanflight, LibrePilot, INAV etc.
Originally INAV concentrated on "big" UAVs with GPS capabilities. After all NAV in name stands for Navigation. Mini-quads and acro performance were left alone, and once again, let's be honest: comparing to Betaflight, it sucked. It was possible, I've even written a short tutorial how to set it up, but it sucked.
Luckily, it is changing. INAV 1.2 had brought some improvements like Iterm limiting and acceleration limiting, and Acro flying in INAV became very nice. Small revolution, or maybe bigger catch up, is planned for INAV 1.3: asynchronous gyroscope, accelerometer and attitude processing. I've been working on it for last few months and results are very promising: INAV can drive a mini-quad with Betaflight comparable performance. Like this (please remember I'm not the best pilot!)
Setup:
- PID task frequency: 1kHz
- Gyro task frequency: 2kHz
- Accelerometer task frequency: 120Hz
- Attitude task frequency: 100Hz
- Frame: Reptile X4R 220
- Motors: EMAX RS2205 2300KV
- Propellers: DALprop TJ5045
- Flight controller: SPracingF3
- Firmware: INAV 1.2 with custom changes
-
Hand on: DAL (DALprop) TJ5045 propellers
After moving to new, 4S powered, mini-quad based on Reptile X4R 220, EMAX RS2205 2300KV and FVT Littlebee 20A, I've discovered that I'm missing some power. DALprop 5040 and DALprop T5040 I've been using on 3S did not delivered enough power. So, I've gave DALprop TJ5045 a try.
According to specs, they should be most efficient from all DAL 5045 family. Well, efficiency will be determined, one thing is sure: they surely give much more thrust and pitch speed comparing to T5040.


Thrust and speed improved a lot. ATM, hover is at about 32% of throttle and climb rate is impressive. I love it! They also seem to be little quieter that T5040.

They are also durable. Maybe I'm not crashing as often as before, but when I do, it's much more spectacular. Today I had two of those spectacular crashes and all propellers survived. Nice.
Read more... -
Marabou Stork: FPV airplane maiden flight
For the last few week I've been little busy building my next fixed wing UAV: "Marabou Stork" Depron/Carbon/3D Printed airplane with pusher prop build for FPV. It's improved version of "Red Cruiser" model from last year.
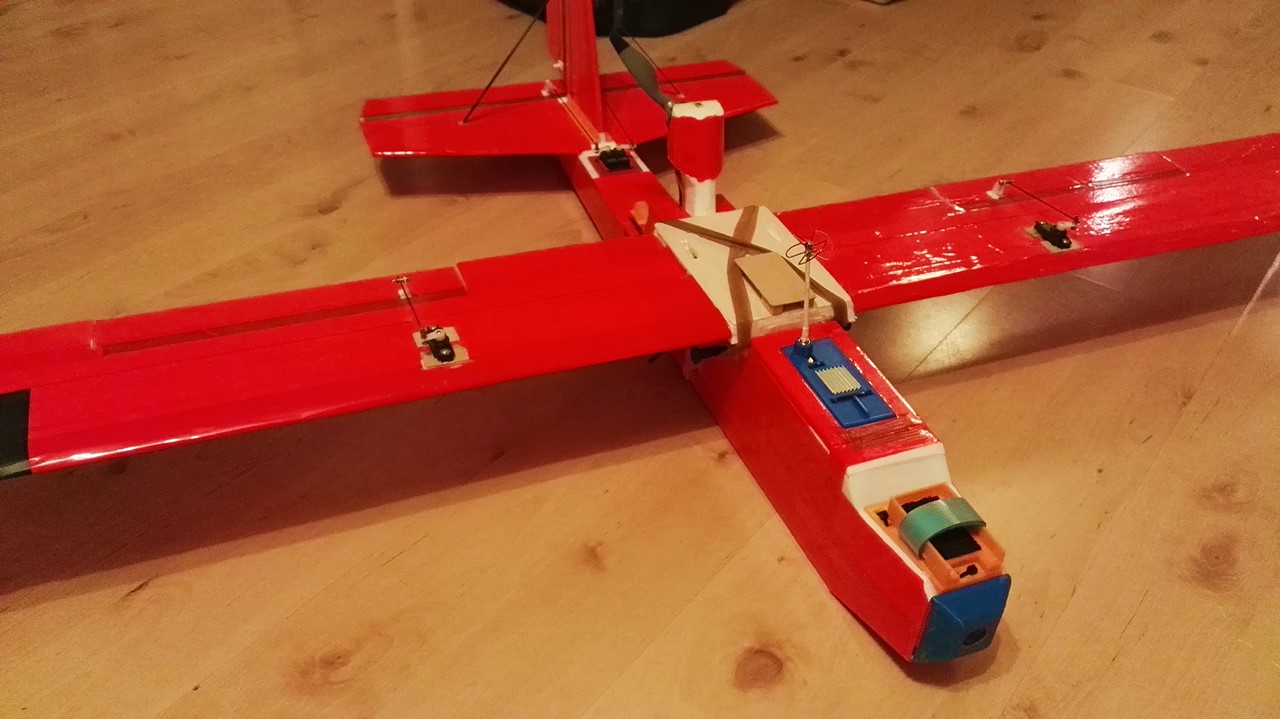

It's equipped with KFm-2 wing, Turnigy D2826-6 2200KV motor, APC-E 7x4" propeller, 2700mAh Lipo battery, FPV setup with MinimOSD and RunCam PZ0420H camera. And Flip32 running INAV for stabilization and navigation (no GPS yet).
As you can see on a video above, it flies. Even pretty well. It needs some tuning, but have big potential. Unfortunately elevator malfunction grounded it after few minutes in the air.
Read more... -
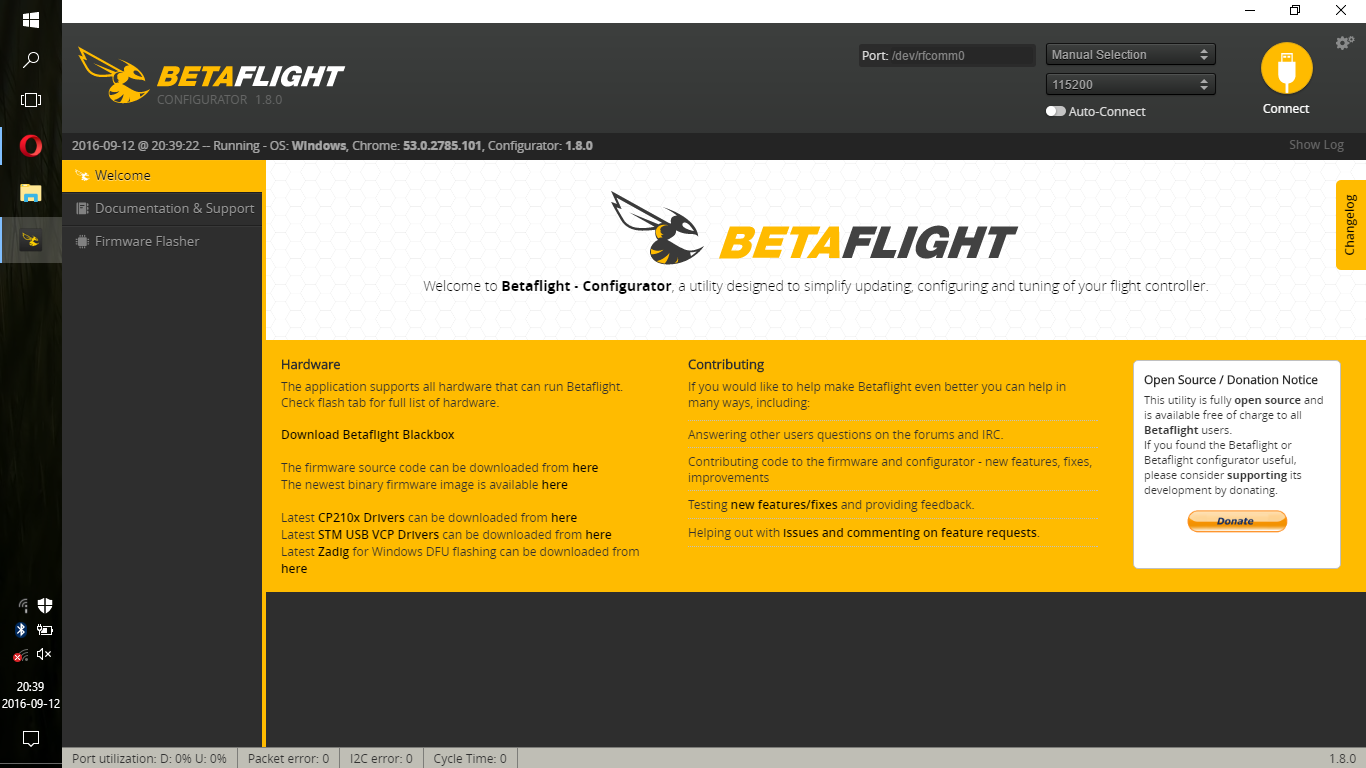
How to install and configure Betaflight 3
Latest Betaflight 3.0 is a new quality for flight controller software. It brings many new, cool, features comparing to previous versions. If you fly mini-quad or micro-quad, you have to check what Betaflight 3 has to offer.
This tutorial will show how to install Betaflight 3 and how to configure it so mini-quad can go into the air in under 20 minutes.
To play with Betaflight 3.0 you will need latest Betaflight Configurator! Install or update to latest version.
Flashing
Open Betaflight Configurator
-
Micro MinimOSD stops overlaying in flight: solution
Both MinimOSD and Micro MinimOSD suffers from irritating technical problem. In some setups, they stops overlaying data during hard maneuvers or even right after arming. Problem is very simple: chip MAX7456 is extremely sensitive in terms of supply voltage quality. Working motors and/or servos, can introduce enough power supply noise to occasionally force MAX7456 to reset.
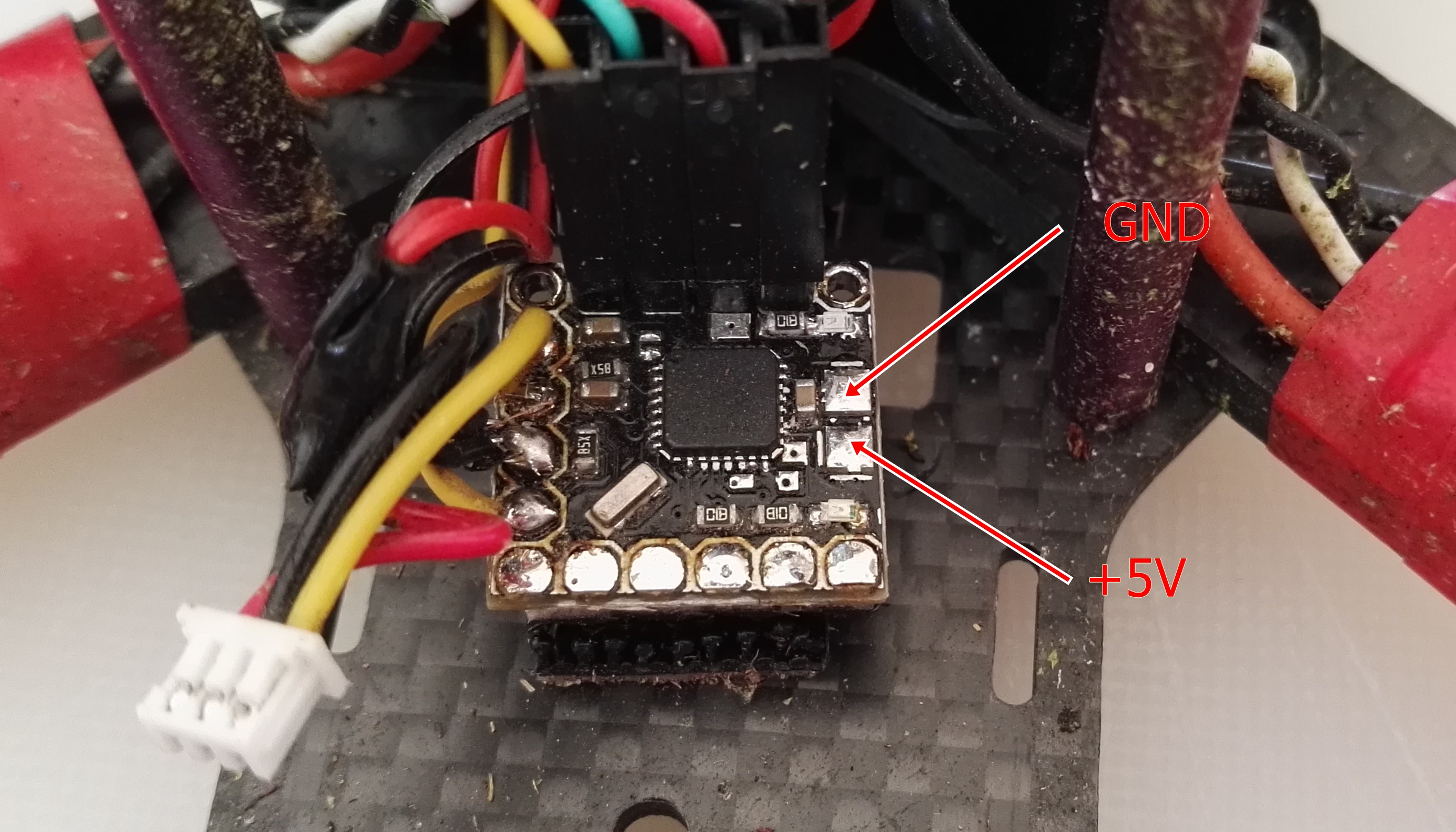
Luckily, solution is simple: separate LC power filter or big enough capacitor connected in parallel to 5V pads of MinimOSD.
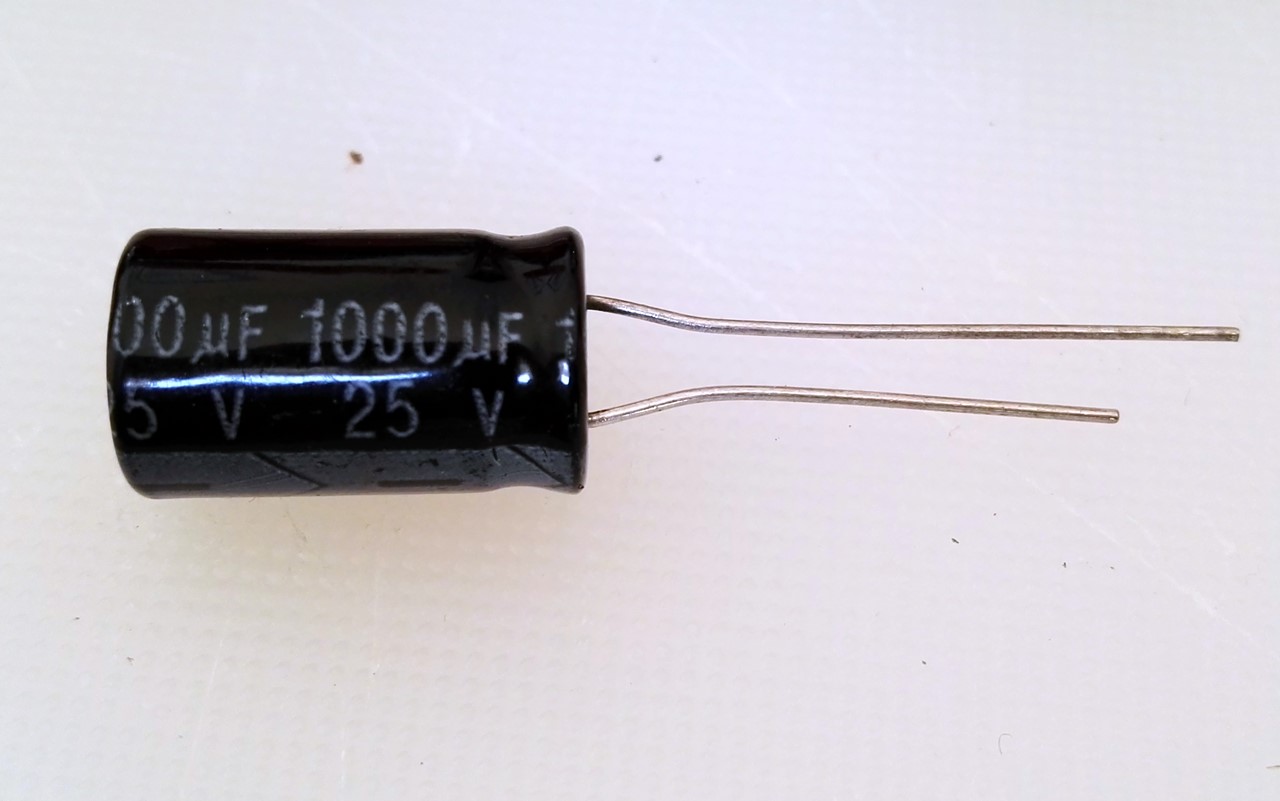
Almost any big enough electrolytic capacitor will do (> 100uF, the bigger the better) but best results can be archived with low ESR > 500uF capacitor.
In my case symptoms were not very strong, usually only very fast flips caused MAX7456 to reset, but I've decided to go big: 1000uF low ESR capacitor.
Micro MinimOSD has 5V pads on a side and they are the best place to attach capacitor.
As you can see below, capacitor is bigger than MinimOSD itself and I had to think a little how to place it inside my Reptile X4R 220 frame.
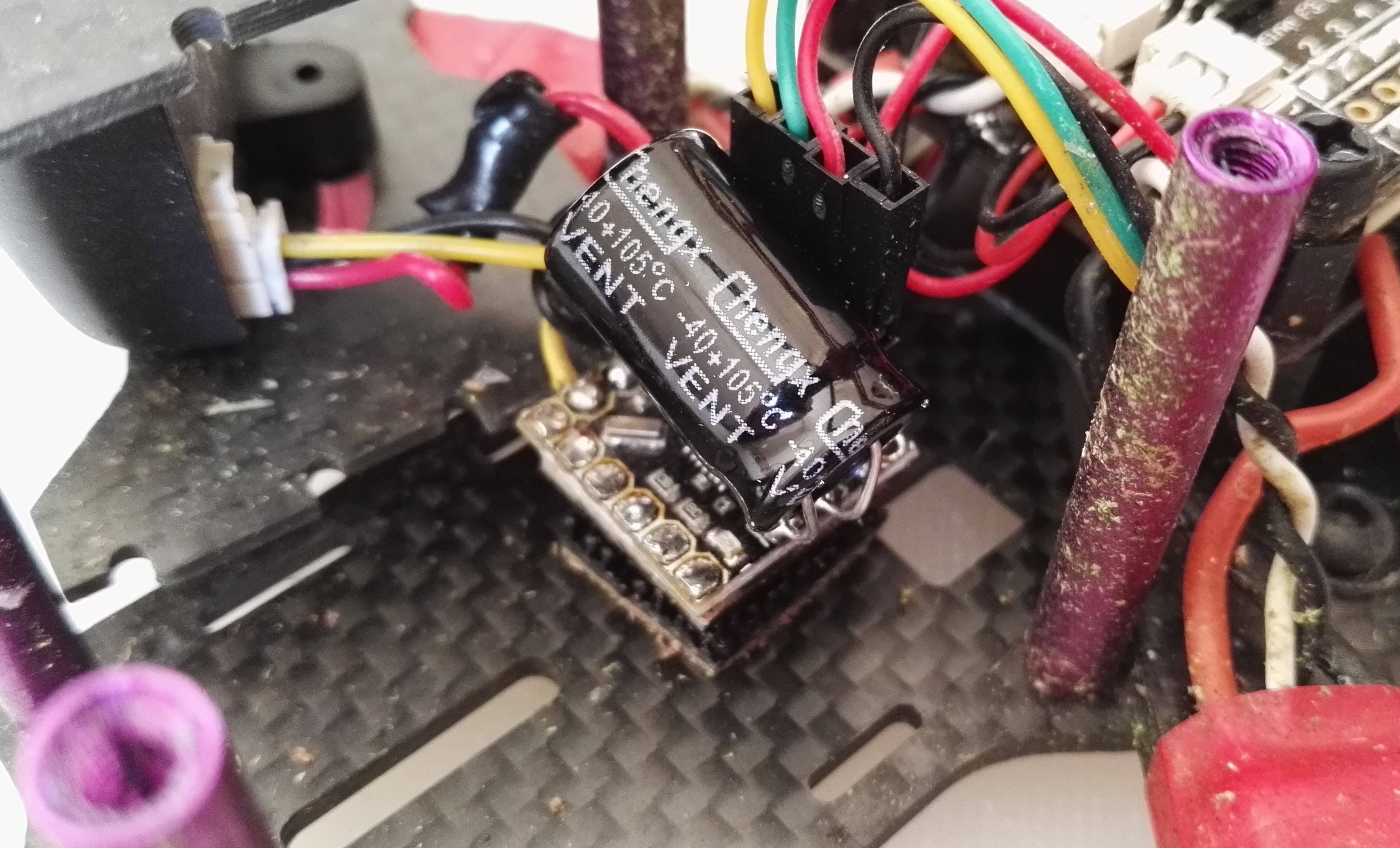
Results are great: no more MinimOSD problems. OSD stays on all the time, no matter how hard I use the stics.
Read more... -
Preview: cheap APM Power Module for Cleanflight
Recently I've got my hands on a pair of cheap APM Power Modules from eBay with integrated 5V BEC and current meter (90A max). Although they are APM designed and will not work stright away with STM32 flight controllers like Naze/CC3D/SPRacingF3 (or rather would work only once since they are 5V scaled and those flight controllers require max 3.3V input) I have an intention to make them work!
So far, I've concluded that:
- current measurement is done with Texas Instruments INA169 and 0.5Ohm shunt resistor
- analog current out is 5V scaled, so probably 90A current flow results in 5V on meter output
- voltage sensor output has 1/2 voltage divider. We can ignore it, most SMT32 flight controllers have voltage dividers (CC3D does not, but 1/2 is not enough in this case)
- It more less works with a 1/2 voltage divider between current sensor and flight controller. Requires some tweaking, but something is measured. Will require scaling!
- Integrated BEC works, and this is all I can tell about it I'm affraid
Read more...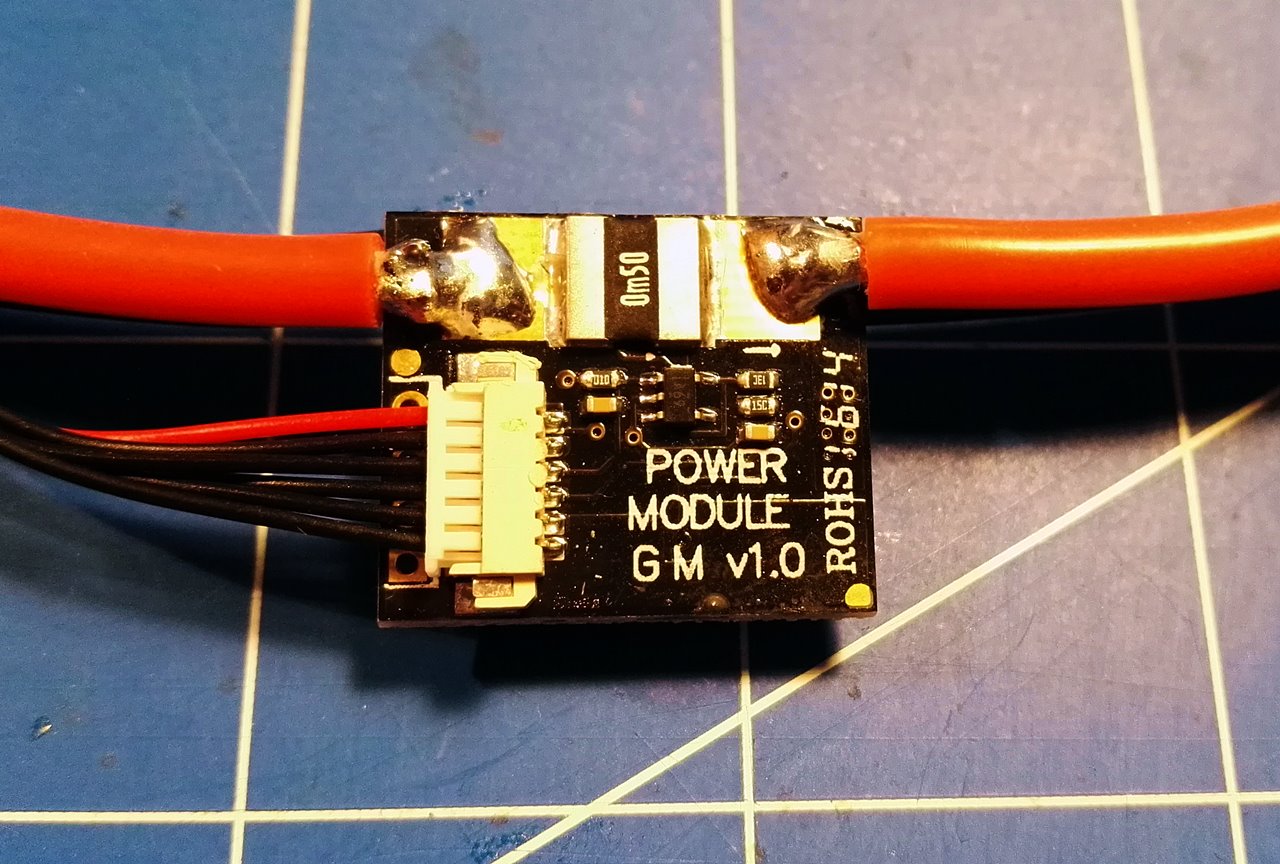

















I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: