How to install and configure Betaflight 3
Latest Betaflight 3.0 is a new quality for flight controller software. It brings many new, cool, features comparing to previous versions. If you fly mini-quad or micro-quad, you have to check what Betaflight 3 has to offer.
This tutorial will show how to install Betaflight 3 and how to configure it so mini-quad can go into the air in under 20 minutes.
To play with Betaflight 3.0 you will need latest Betaflight Configurator! Install or update to latest version.
Flashing
Open Betaflight Configurator
Goto Firmware Flasher, connect the board via USB, choose board type and software version. I will be using SPRacingF3.
Click Load Firmware [Online] and then Flash Firmware
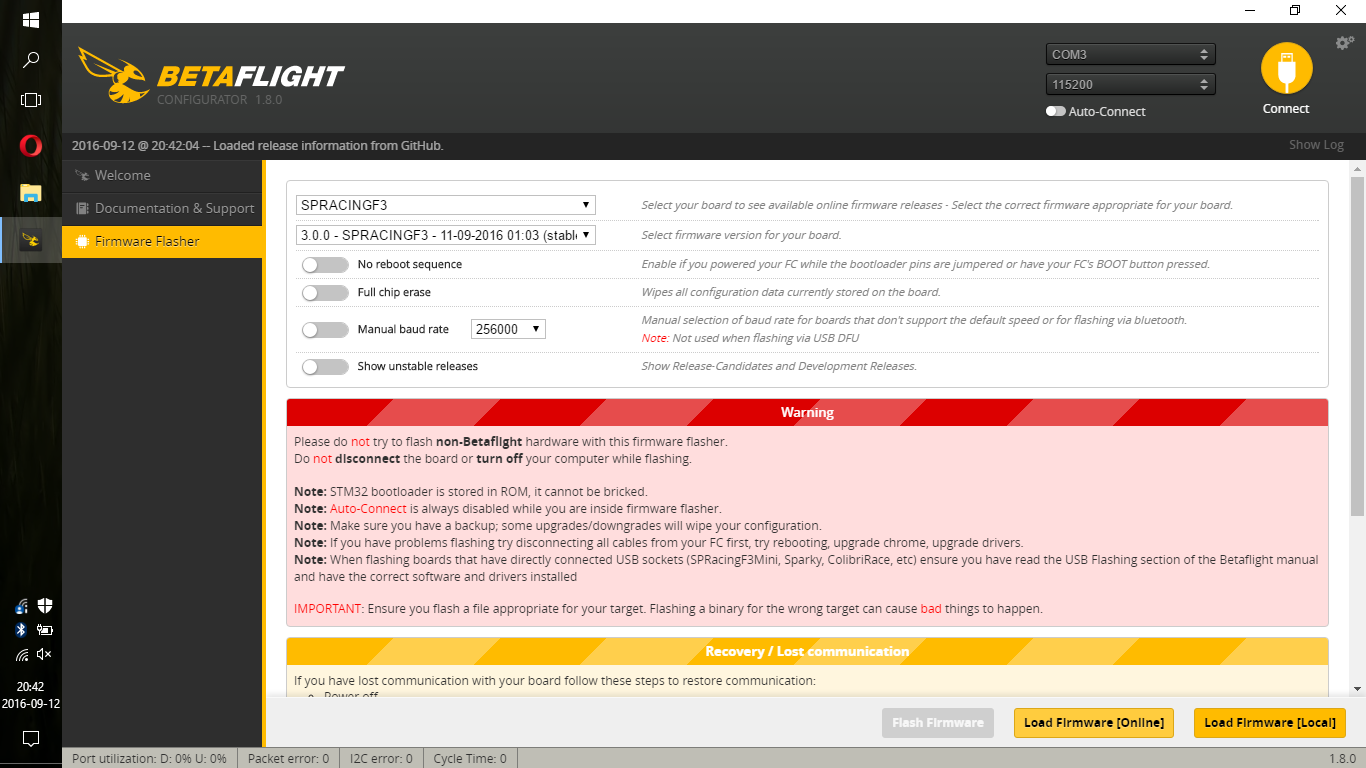
After flashing is done, we can go to the next step...
Configuration
After clicking Connect button, Setup Tab will be shown. Top bar will show detected sensors. You should have at least Gyro and Acc, but only Gyro is required to fly.
There is only one thing we should do here: Accelerometer Calibration. Place mini-quad on a leveled surface and click Calibrate Accelerometer button. Do not move mini-quad during process.
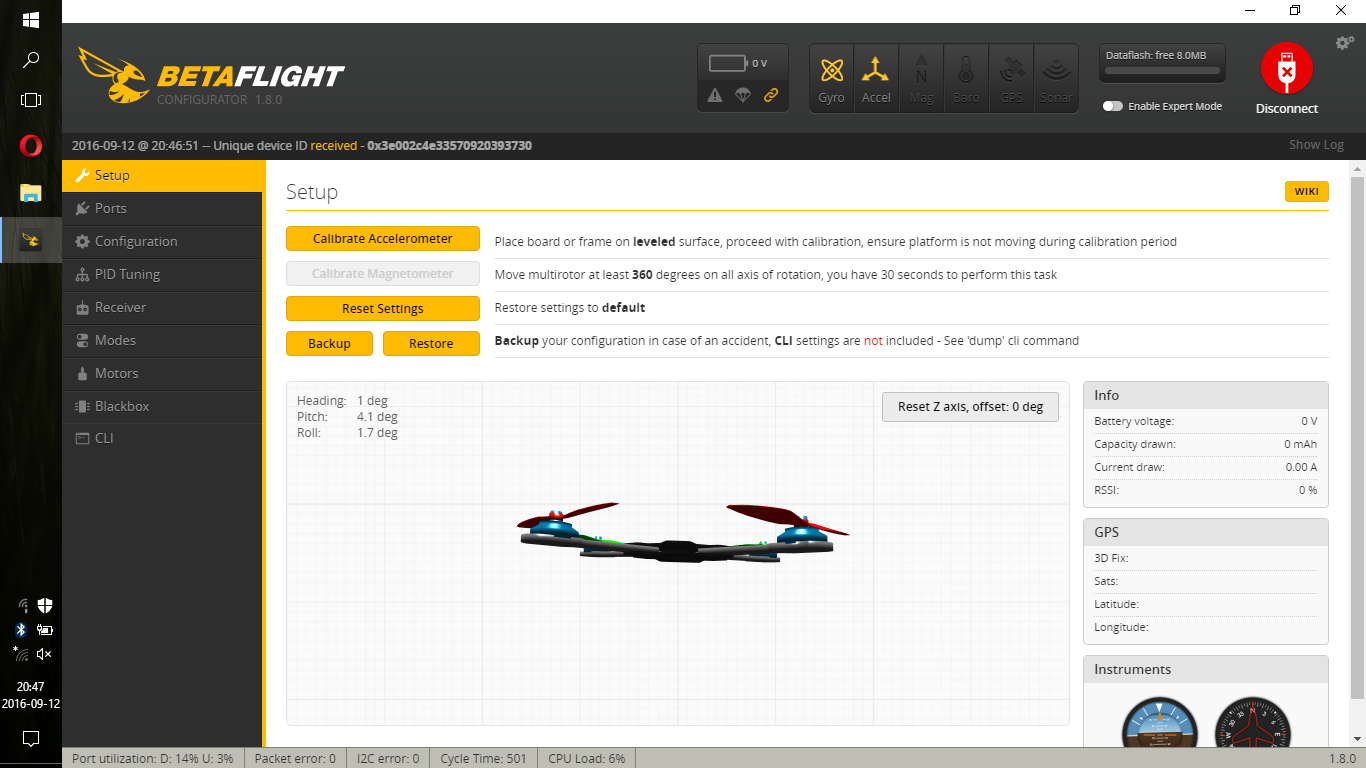
Once accelerometer calibration is done, let's move to Configuration Tab.
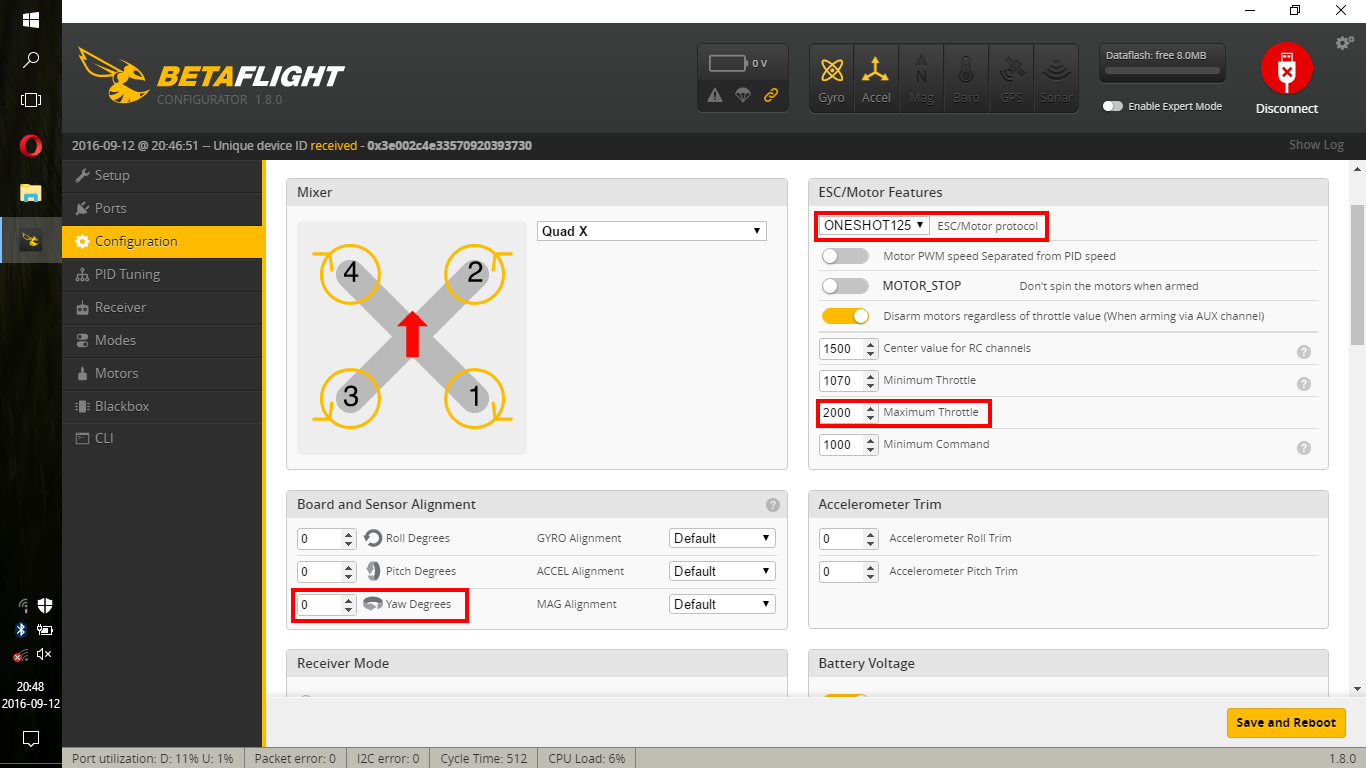
Things we should do:
- Select Mixer Type. On a mini-quad leave default Quad X mixer
- Select ESC protocol. Default OneShot125 will work with majority of ESCs. If ESC supports faster protocol, you can choose OneShot42 or Multishot. PWM protocol should be used only in case of legacy ESCs
- If you are migrating from Cleanflight and had ESC calibrated there, change Minimum Throttle to 1850. If you will leave default 2000, you will have to recalibrate all ESCs. All new build should always calibrate ESCs
- Board and Sensor Alignment. If flight controller is rotated in any direction, you have to tell FC about it. This is counted clockwise. So, is board is rotated to the right, put
90is yaw section. If it is rotated to the left, put270
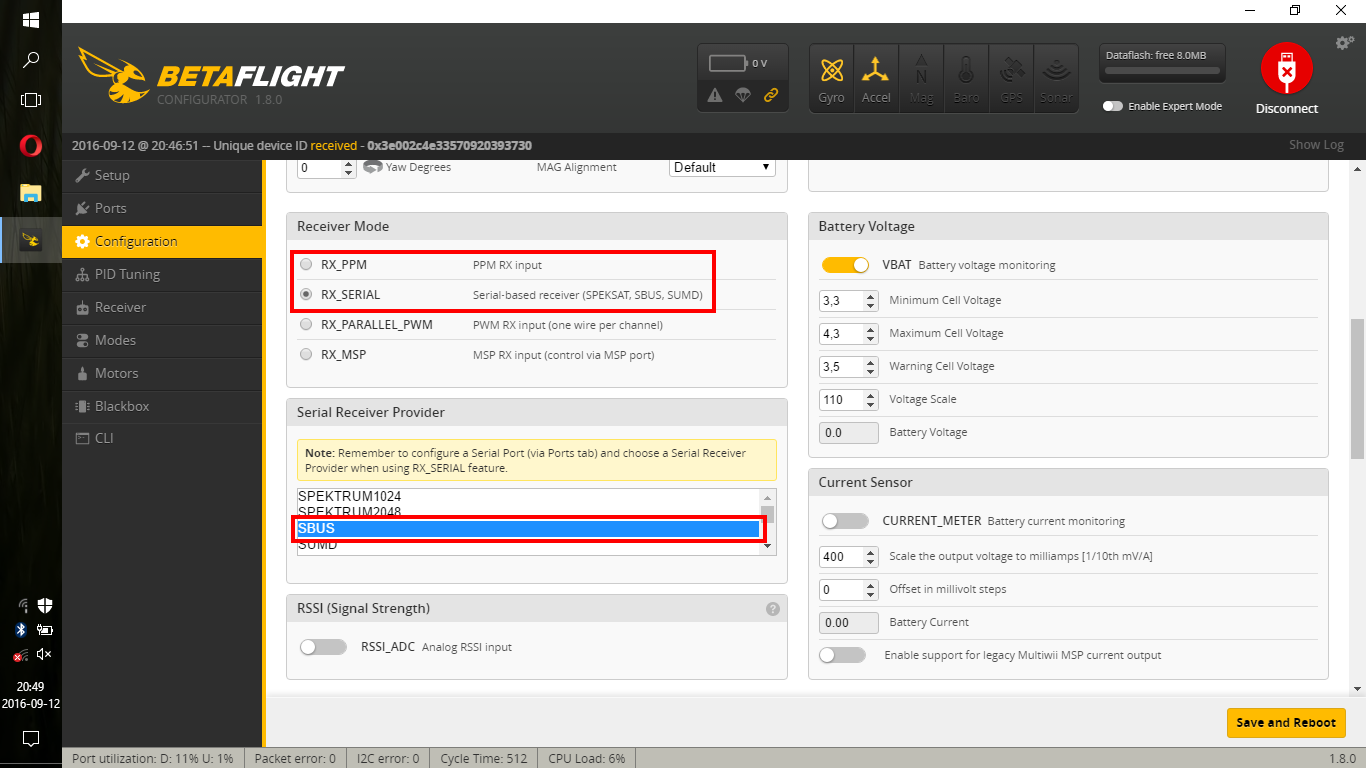
On the same tab, configure Receiver Mode and in case of RX_SERIAL also choose correct protocol. In my case this is Serial RX and FrSky S.Bus
Betaflight 3.0 can process gyro and PID loop separately. This can be set in System Configuration section. I was perfectly happy with 2kHz mode on gyro and 1kHz mode on PID loop, so I've left defaults unchanged. You ca try pushing this higher, but hardware has to able to satisfy your requirements. For example, you can rather forget about 4kHz mode with I2C connected gyros.
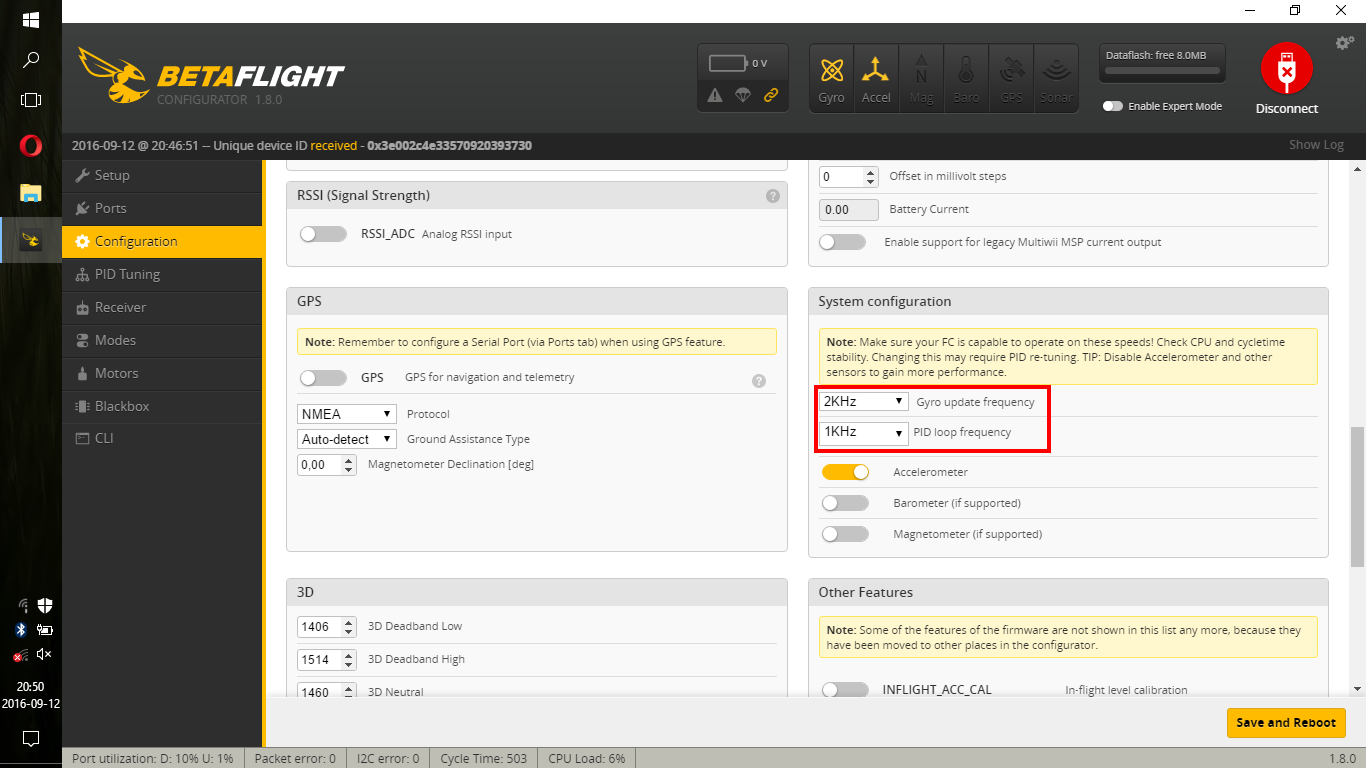
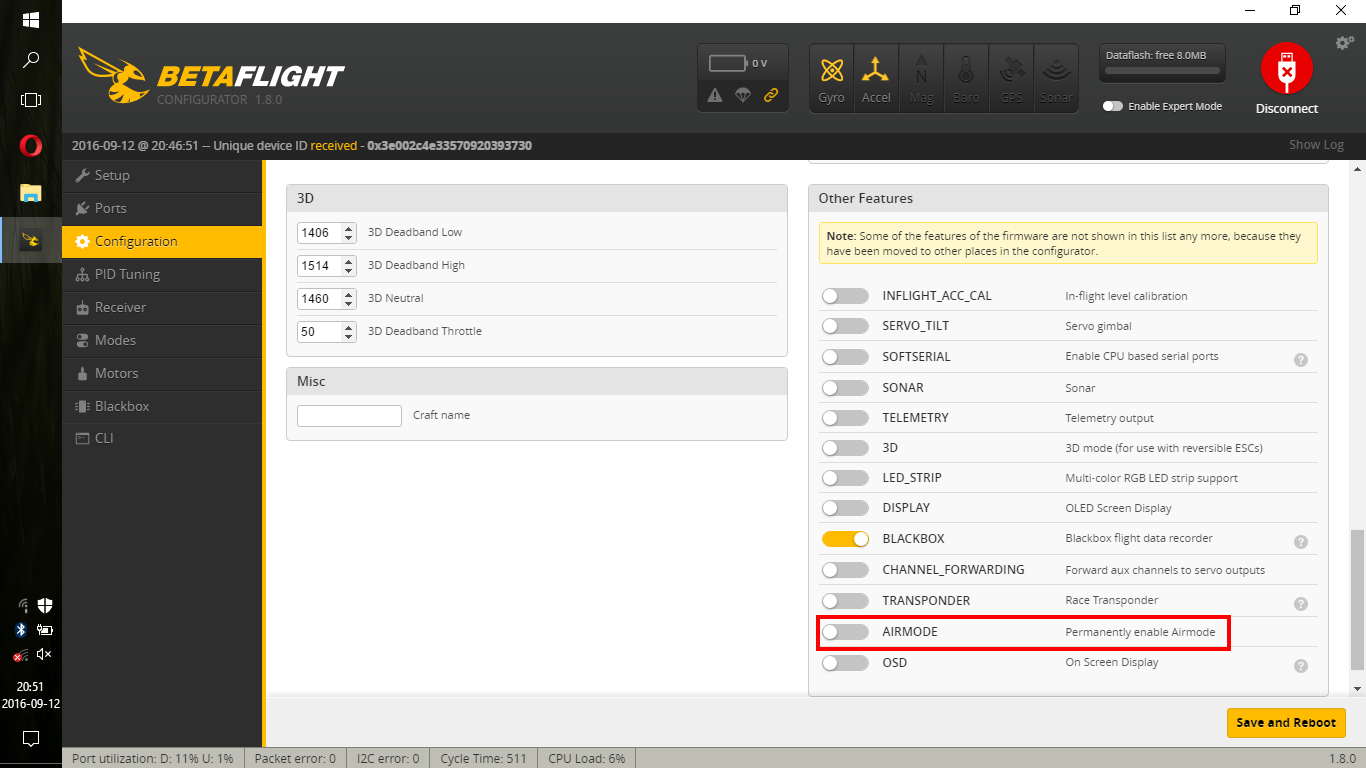
Last thing we can decide here is to set AirMode permanently on. I've decided not to, but this is personal preference.
Click Save and Reset and let's go to Ports Tab.
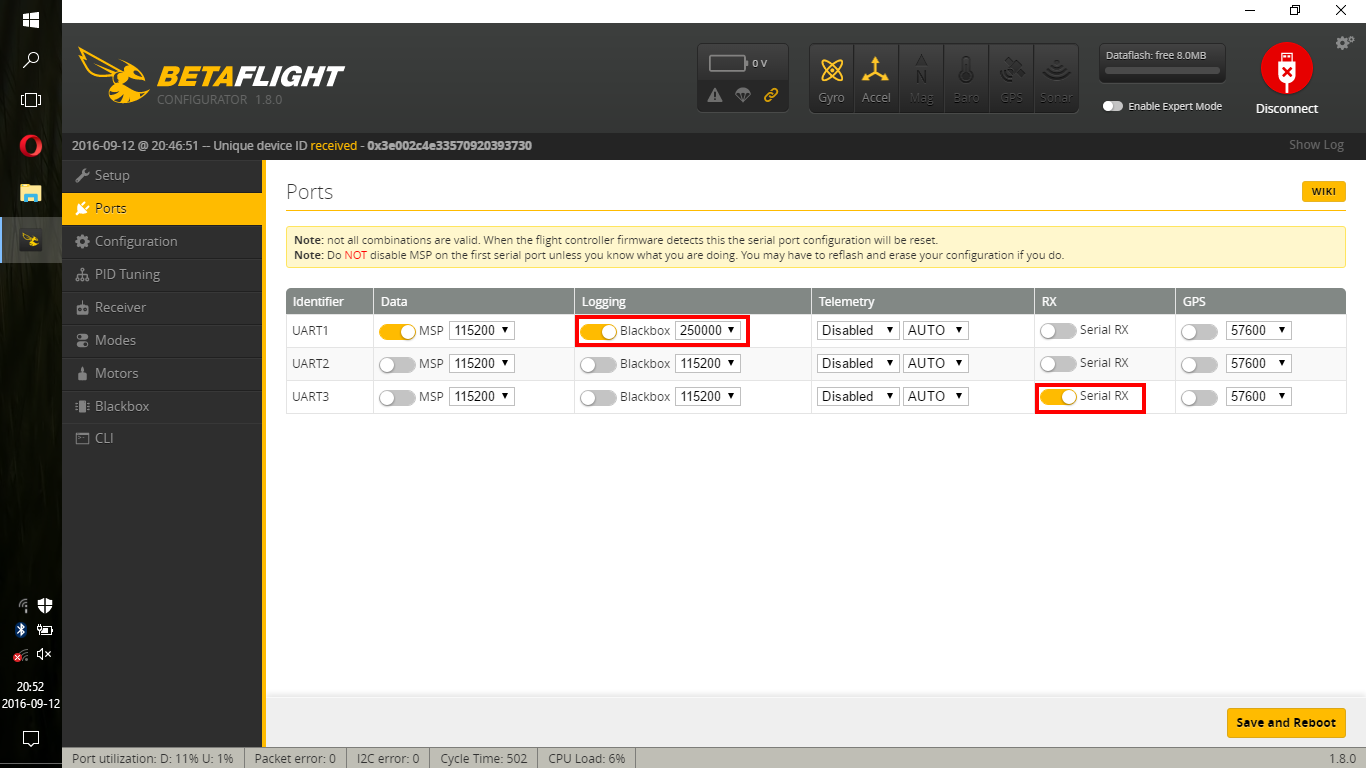
Since I've enabled Serial RX S.Bus, I also had to tell FC where it is connected. In my case it was UART3. In case of PWM or PPM, this is not need.
Also, I'm not using internal flash for Blackbox, so, I've configured UART1 and Blackbox port with a speed of 250000bps for external SD logger. Blackbox can be shared with MSP, so this is not a problem. I will also have to set blackbox_device=SERIAL in CLI if I want to save Blackbox data using external logger.
Now, let's go to PID Tuning Tab and let's see what new BF 3 has to offer here.
First of all, there are only 2 PID controllers now: Betaflight and Legacy. Legacy is actually a renamed MWRewrite and it should not be used. It is faster, but offers less than Betaflight PID controller. So, if you really, really, really do not have to select Legacy, stay with Betaflight.
Super Expo is gone, Super Rates are in. On the right you will see Rates curve for current RC Rate, Super Rate and RC Expo. In the middle, computed max. rotation rate for each axis. Default values are for average pilots. Beginners might want to lower Super Rate so velocity in deg/s is lower than default 667dps. 200-300dps should be enough for beginners. Experts will want to increase it. Sometimes a lot!
New Betaflight PID controller introduced 2 degrees of freedom for PID loop. This can be set in PID Controller Settings. Default values are great. If you want to tune it, see this video for explanations.
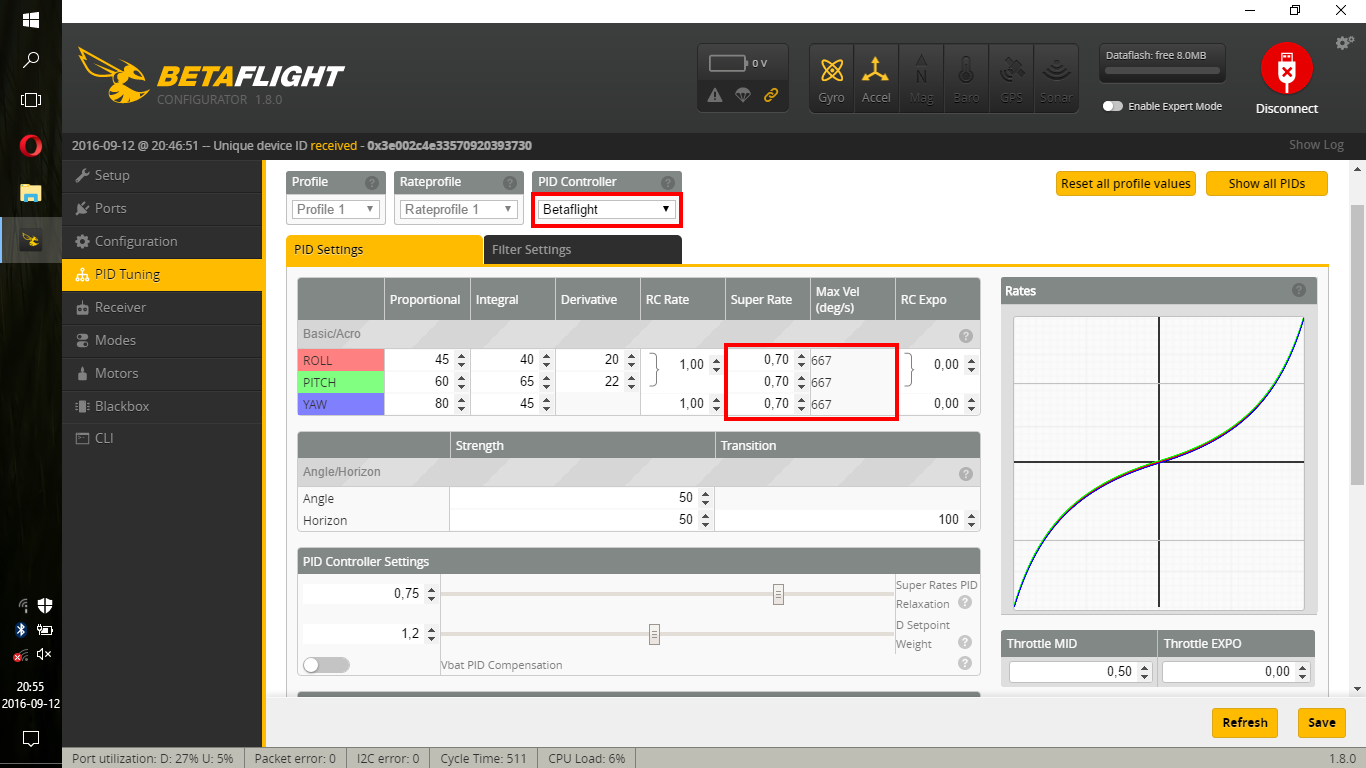
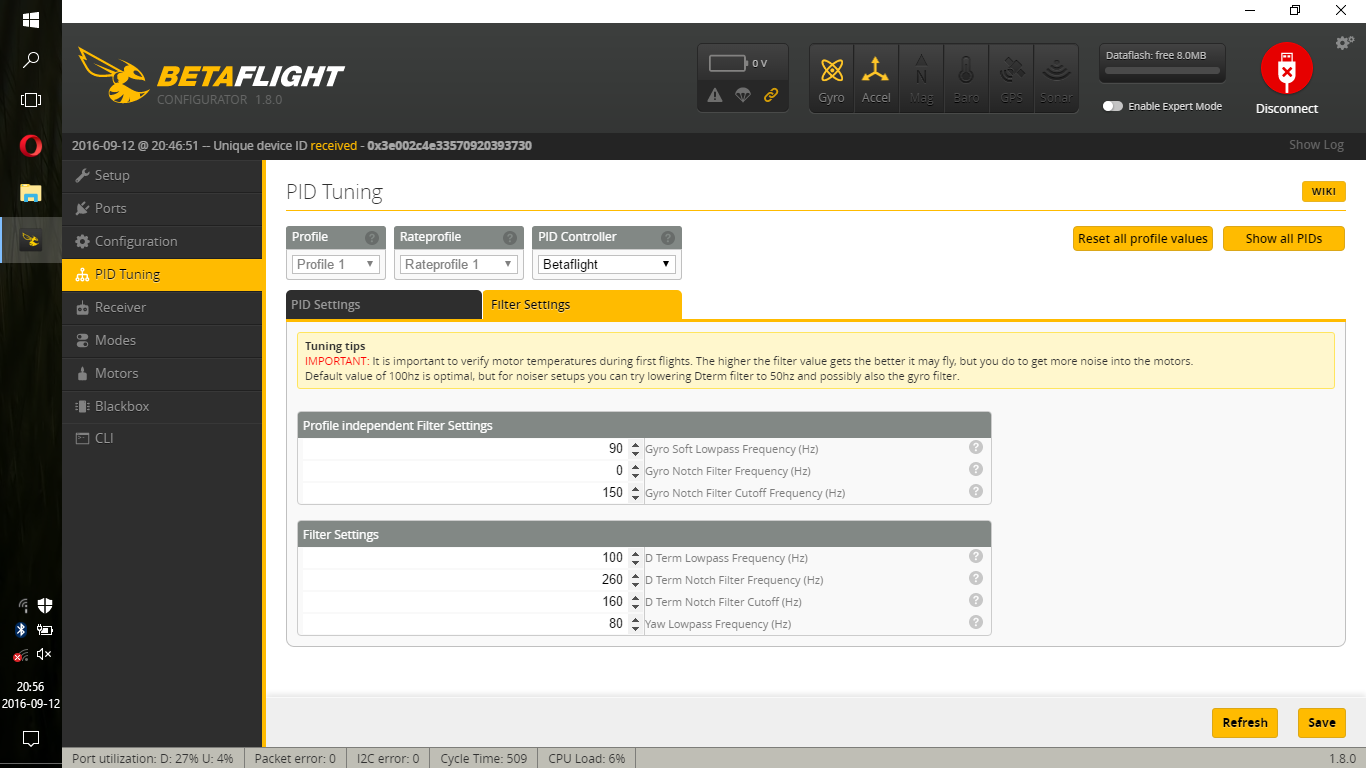
Betaflight 3.0 also introduced notch filters. I will try to cover them in future post, for now leave them defaults. If your motors are getting very hot during flight, try lowering D Term Lowpass Frequency to 60Hz.
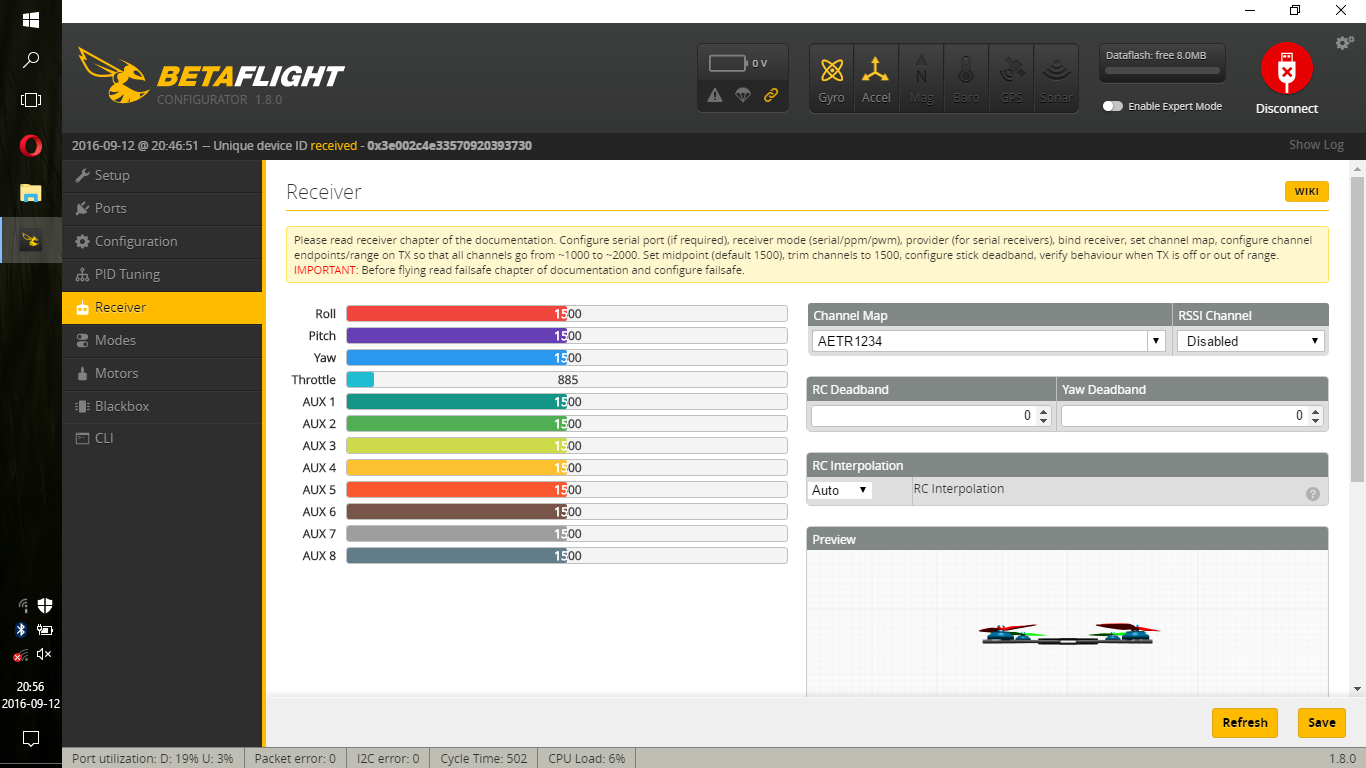
There is nothing to set on Receiver tab. But you can verify is radio is working here.
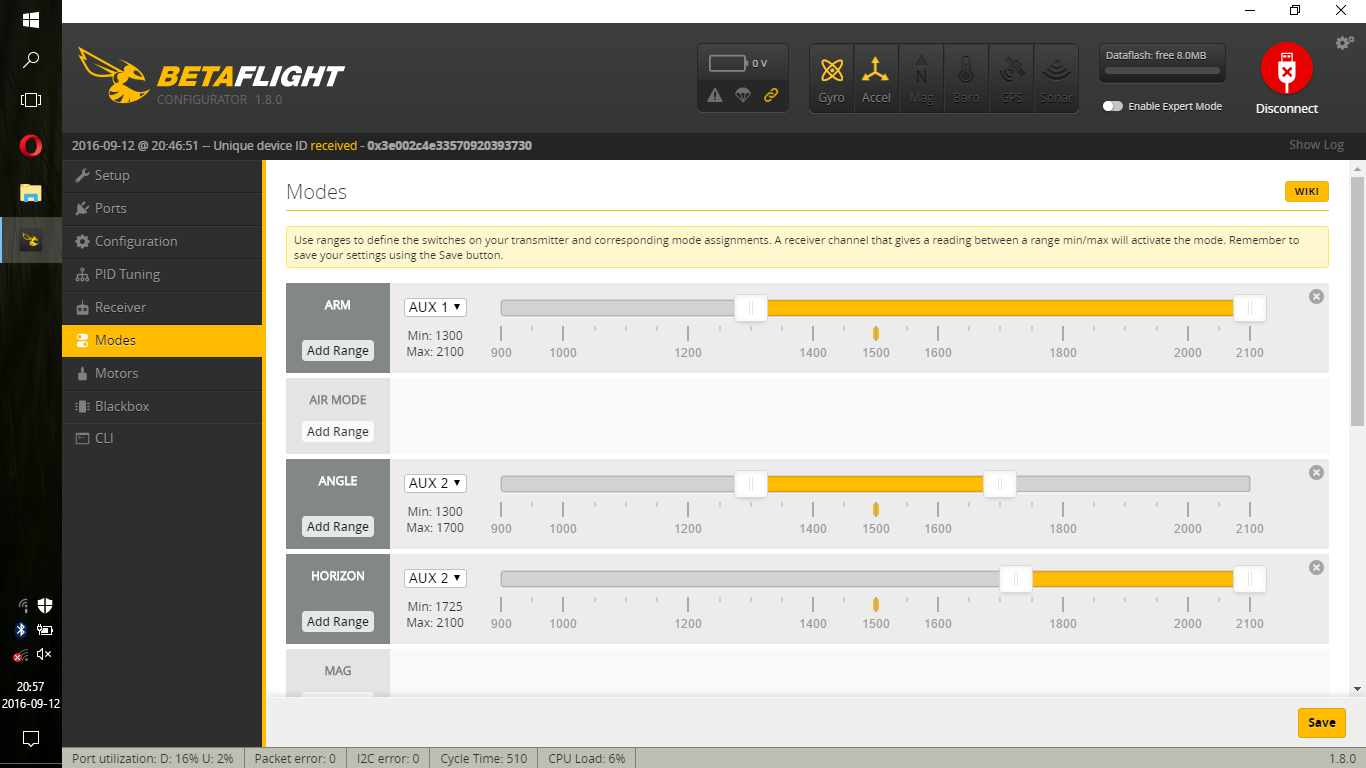
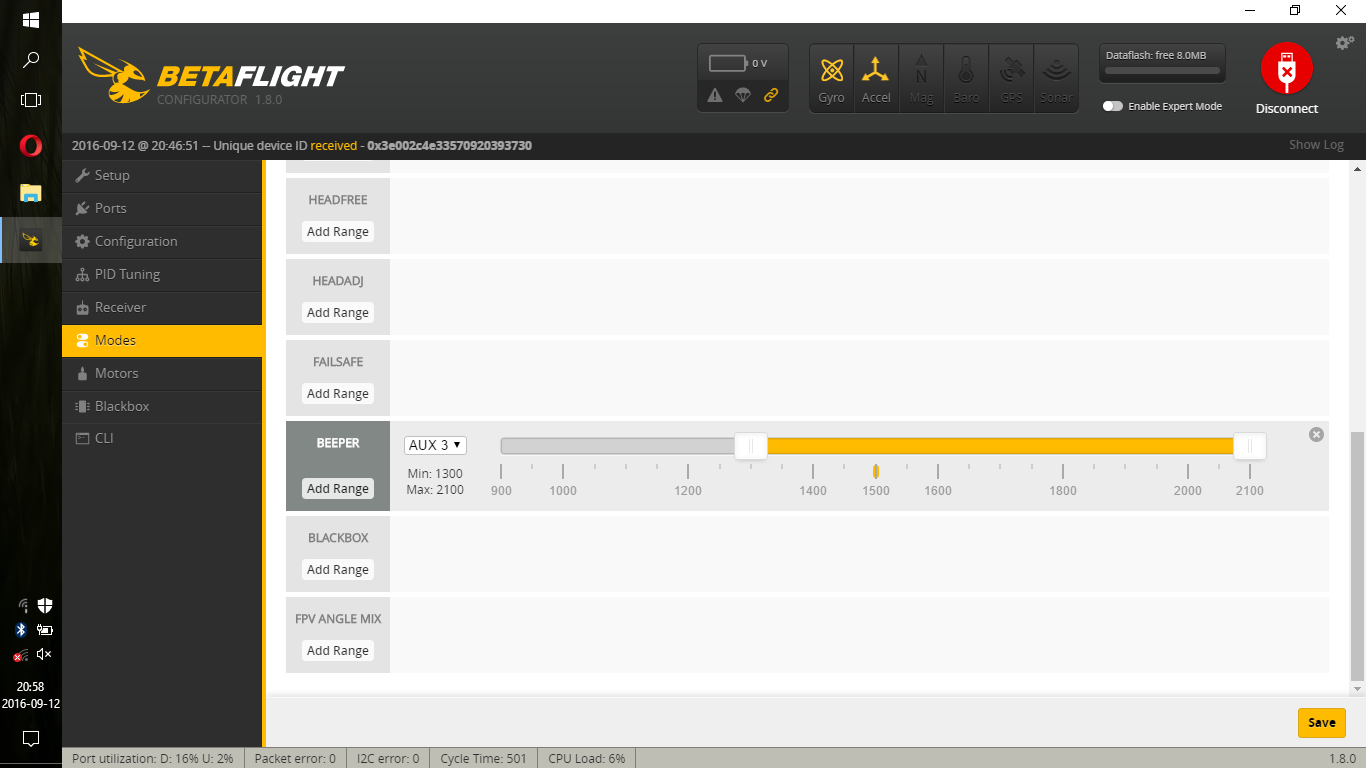
Last important tab is Modes. I've decided for Arming on AUX1, ACRO/ANGLE/HORIZON switch on AUX2 and BEEPER on AUX3. If you decided not to have AirMode enabled permanently in Configuration Tab, you should set it here.
That's all, your mini-quad flashed with Betaflight 3.0 should be ready to fly!

I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: