-
INAV Braking Mode for multirotors
Flying with a multirotor drone with INAV always had a problem: braking. When you were flying fast and then release the stick, a drone was not braking very fast, then it was going back to the place where you released the sticks. Rubberbanding. Irritating.
Over the time there were at least 2 attempts to fix it. Mine is at least the 3rd one and is called "Braking Mode". How it works:
- when you release the sticks and speed is high enough, the drone is allowed to boost braking angle and speed
- when braking is done, speed is low or close to zero, the current position is stored and new target position. Rubberbanding is gone
-
INAV DualCopter is (was) flying...
It took me some time to finish this project. Almost two years. But my 3D printed dualcopter is done. It flew, it crashed, it is not more. But do not worry, it's not the end. The second generation of 3D printed dualcopter is on its way
Read more... -
Betalight 3.3 and Kalman filter (BiQuad+FIR2 to be precise) situation
Betaflight 3.3 RC1
Betaflight is at the end of next release cycle. Betaflight 3.3 RC1 has been released only 2 days ago and that brought us a (not) Kalman filter! Long story short:
- Raceflight was using Kalman (Fast Kalman Filter - FKF)
- RS2K left RF and brought FKF to Betalight
- Betaflight did some changes and replaced Fast Kalman with BiQuad + FIR2 (Finite Response Filter) equivalent that gives more less the same results (same response) as Fast Kalman
Unfortunately, someone at Betaflight forgot that users will want to use it and the process of setting up (not) Kalman filter (I will be calling this (not)Kalman because it just sounds better than BiQuad+FIR2 and says all you need to know) is at least stupid. The filter is gyro update frequency dependent and instead of setting up a cutoff frequency, it has to be tuned using
gyro_filter_qandgyro_filter_rCLI settings that you have to guess or compute somewhere else. How awesome is that!Anyhow, to make life a little easier I prepared an online (not) Kalman filter calculator for Betaflight 3.3 RC1 that allows computing filter cutoff frequency based on
gyro_filter_q,gyro_filter_rand gyro update frequency.Also, here is a YouTube video that shows how to use it and configure BF 3.3 RC1 for (not) Kalman:
And another video that shares some more general thoughts on the topic:
Betaflight 3.3 RC2 (upcoming)
Ah yes, there was a small change... Looks like BF guys decided to make life a little easier for us after all, and sped up a small but very important change. Starting from Betaflight 3.3 RC2 (or today's nightly build), (not) Kalman filter cutoff frequency can be specified with a single CLI setting:
gyro_stage2_lowpass_hz. More than that,gyro_filter_qandgyro_filter_rare removed and not available at all.I always knew that developers need some proper motivation, but why could this not be like that from the beginning?
Read more... -
First glance at Armattan Rooster FPV quadcopter drone frame
After flying chinesium (XMR250, Reptile X4R 220, Martian II) and frames from DemonRC I've decided to switch to completely different brand. My choice is Armattan Rooster, the newest freestyle frame from Armattan.







Rooster arrived few days ago, and this is what I can say about it before putting all the stuff into it:
- sunken nuts you have to install by yourself are a very idea. It's hard to do without tools and skills. It would be much much better is they were preinstalled. Armattan, please, fix it!
- additional pair of standoffs between plates would not hurt
- it is tight inside and I will have to be creative to fit X4R and TBS Unify Pro in the back of the frame
- frame itself looks good tho. I might even say it is pretty
-
3D printed racing drone, part 3
It is done. It is alive. My 3D printed FPV racing drone works. A few weeks ago I finally flight tested my design and it works! Even better than expected, since I survived the experience without a scratch. OK, I did not crash it yet, but give me some time for that too....

And I have a cool name for it: Isando which means hammer in Zulu. Kind of fits, right?
Ah, STL files are available on Thingiverse of course.
Read more... -
Realacc UXII circular polarized 5.8GHz FPV antenna - Lumenier AXII chinesium clone
Cloners gonna clone and chinesium keeps being chinesium! It did not take long for Banggood / Realacc to clone Lumenier AXII FPV antennas and call them Realacc UXII circular polarized FPV antenna. Coincidence? I do not think so.

I've ordered few of those in December, they arrived last week and this is what came in package


Unfortunately, in this case, the build quality was typical chinesium. As soon as I opened one of them, antenna disintegrated... oh bugger...

I only hope the other (the one I did not open) works like expected. I did not test them in real life conditions since the weather is rather bad over here. This weekend maybe... In a meantime, here is a video of what is happening inside Realacc UXII 5.8GHz antenna.
Read more... -
Troubleshoothing INAV: magnetometer/compass is not working
Your magnetometer/compass is not working with INAV? Is the sensor red in Configurator? You are not the only one... Not only most popular compass HMC5883l is discontinued and what you get are Chinese clones, chip labeled 5883 might not be HMC5883l but something completely different. And I2C bus is very very picky and likes to give up on you....
This is how you might fix your problems: add pullup resistors for I2C SCL and SDA lines and/or lower
Read more...i2c_speed... -
qUark Vision F4: flight controllers designed for INAV
Things are changing in INAV world. Different manufacturers start to realize that world does not end on racing miniquads and people might be interested in other types of flight controllers. Flight controllers that were not designed with racing in mind. And today I can finally show you prototype of such flight controller: qUark F4 Vision
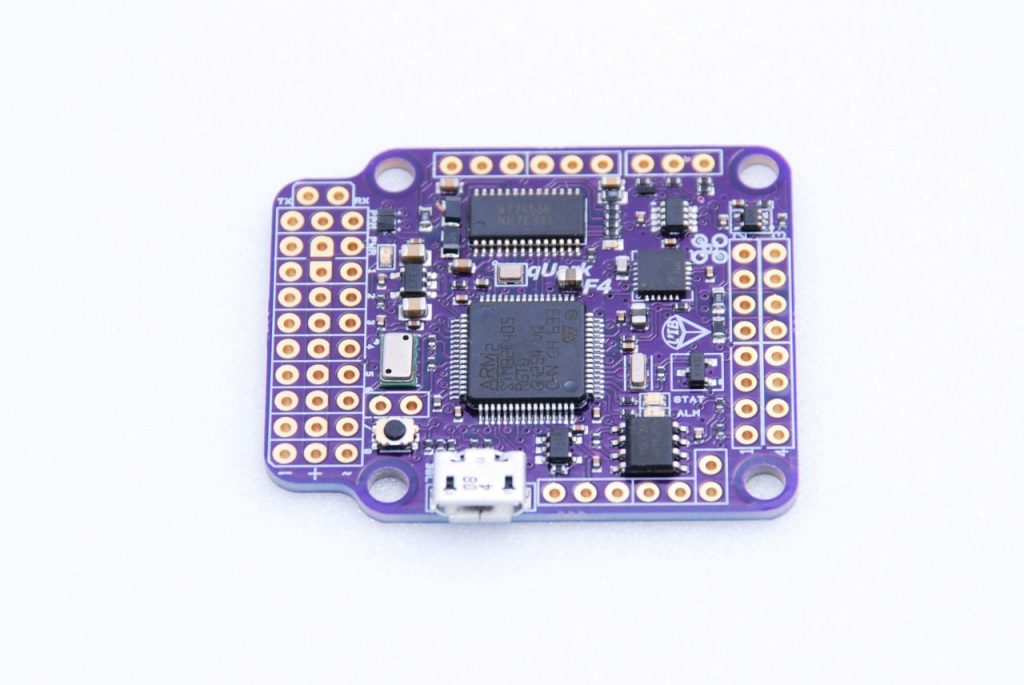
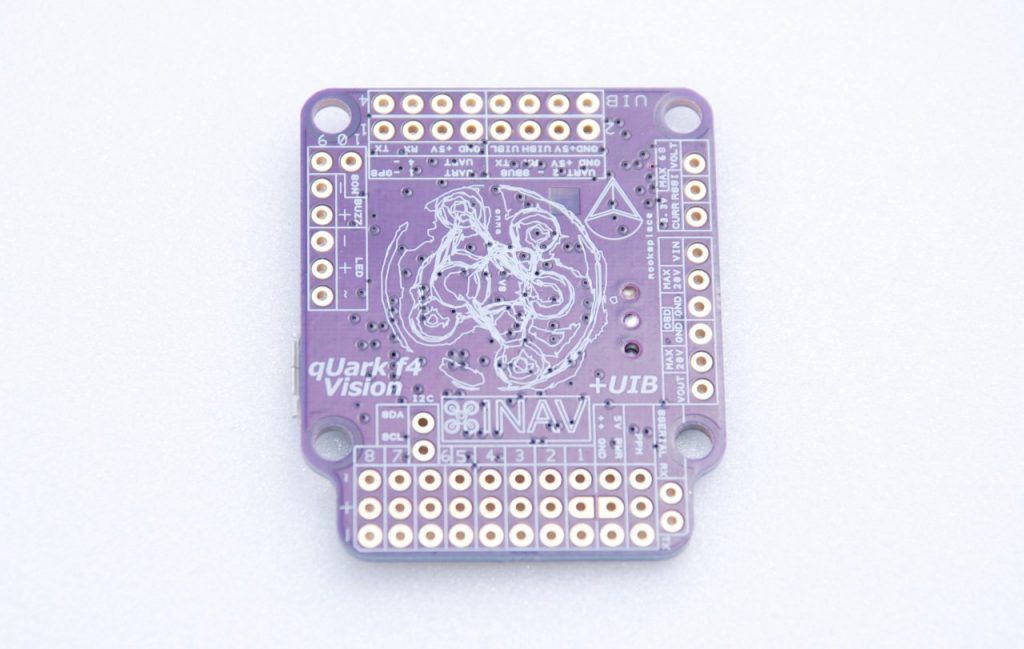
What is so special about qUark F4 Vision. To be honest, not that much. Setup looks pretty standard:
- STM32F4 CPU
- MPU6000 IMU (gyroscope and accelerometer)
- built-in OSD
- built-in barometer
- 8 PWM outputs
- S.Bus inverter
- Buzzer port
- pins for WS2812b RGB LEDs
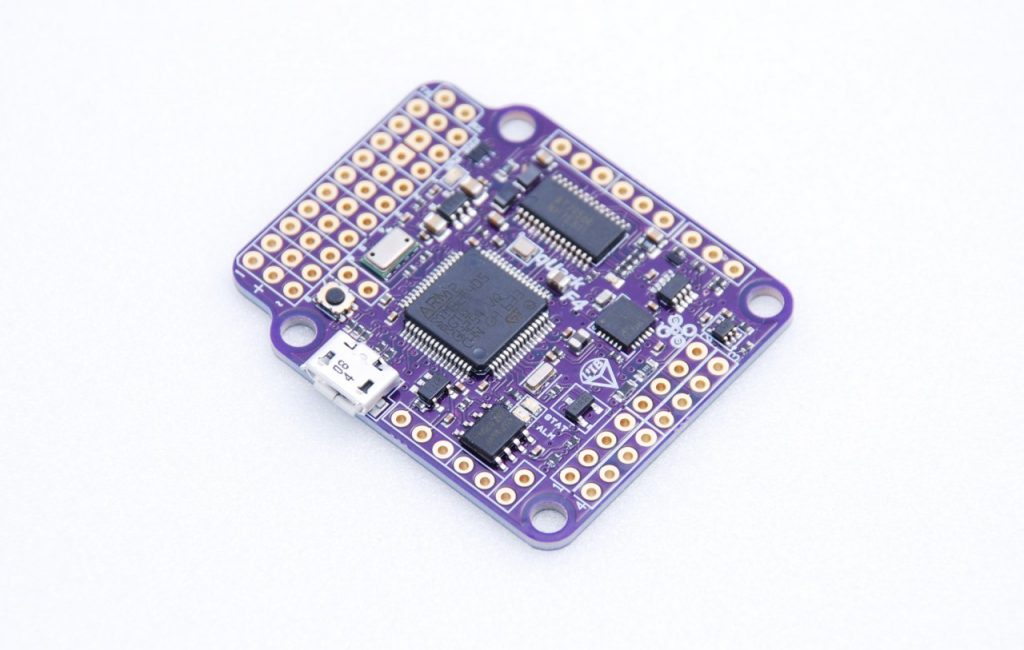
Until now, nothing fancy, right? Good stuff begins when we take a look at details:
- PMW outputs power rail is separated from the onboard 5V line. That means you can use high voltage servos, as well as do not worry about frying onboard 5V voltage regulator
- There is no onboard 5V voltage stabilizer. 5V has to provided from external source of your choice
- It is not 36x36mm with 30.5mm hole spacing. It's still 30.5mm hole spacing, but one side is longer to fit all PWM outputs
- Bottom side of PCB is flat. There are no electronic components over there. And that means FC can be attached with double-sided adhesive tape. Great for foamies
- There are 3 fully operational UARTs (1,2 with S.Bus inverter and 4), separate I2C port (not shared with any UART like on all Revo derivatives) and possibility to use Software Serial
- Special work in progress UIB port that is specific to INAV. It does not do much now, but it might change in the future
- dedicated pads for HC-SR04/US-100 sonar rangefinder (I have not seen that for a while)
Something different, right? I'm putting mine on my experimental flying wing where it will feel like at home.
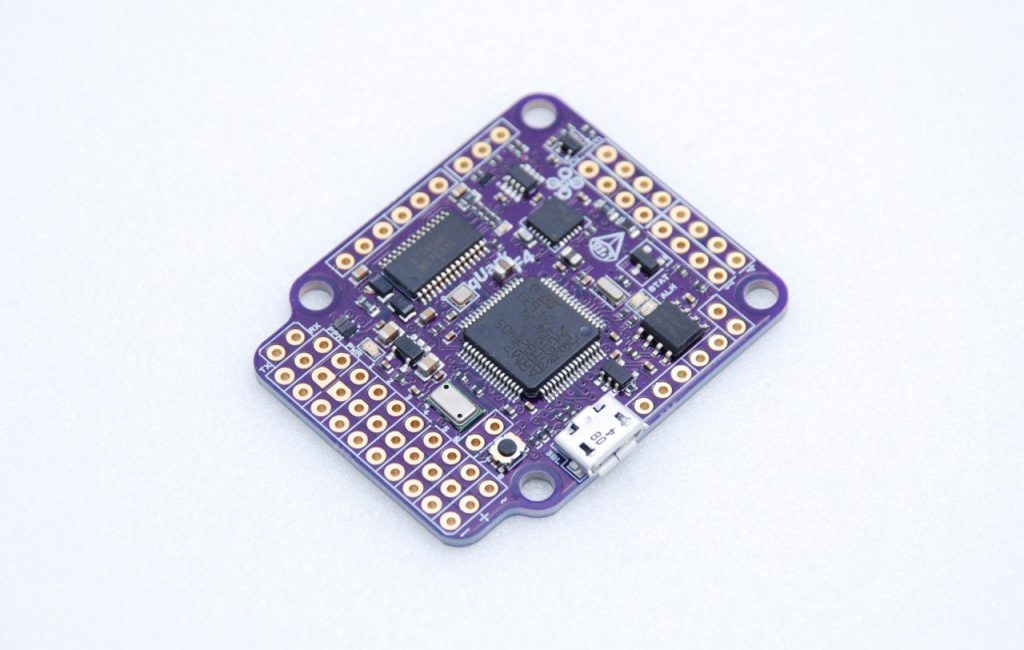
Like I wrote at the beginning, this is a prototype. It can not be bought yet. But if you are interested, you might email Malcolm at [email protected]
Read more... -
Troubleshooting INAV: why INAV is not arming
Few weeks ago I've decided to shoot more tutorial videos about INAV and this is the first effect of that decission: INAV Troubleshooting: why INAV is not arming
Read more... -
Parallel LiPo charging video tutorial
Here is another of my tutorial YouTube videos. This time, I talk a little about parallel LiPo charging: why to do it, how to do it and
Read more...
why it might be dangerous when you do it wrong:


















I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: