-
Let's build a FPV drone: frame assembly
Yesterday I finaly had some time to work on my 250 class quadcopter based on ZMR250 carbon fiber frame. There was a plan to finish it before weekend, but looks like plan will have to be changed. I'm missing motor screws. They were not with frame nor motors. Too bad...

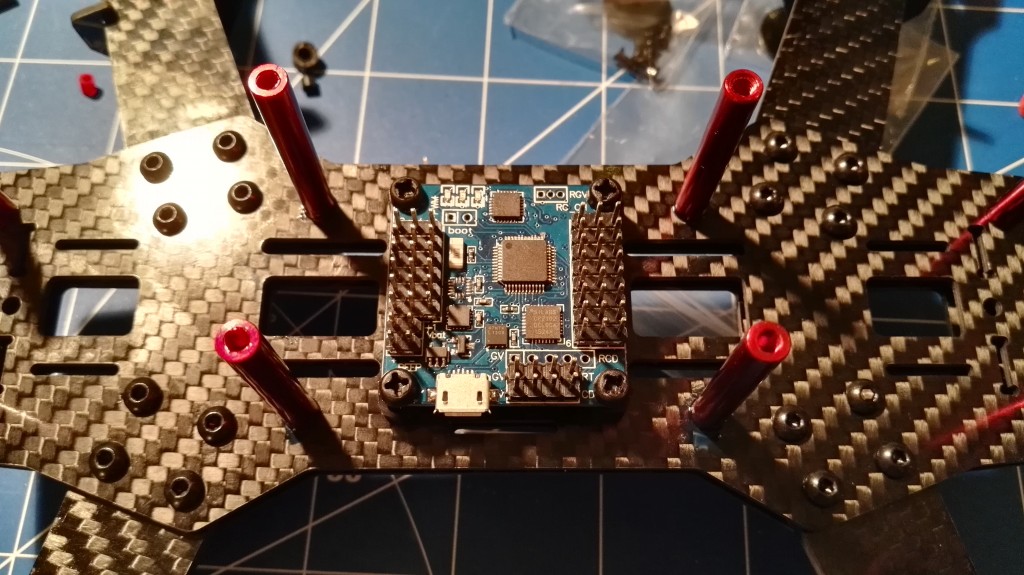

After one evening of work I've been able to assemble bottom plate with motor arms and attach Flip32+ flight controller to it. As you can see, Flip32 is rotated 90 degrees clockwise. USB port points left, not back. This allows much simpler access to USB port. On the other hand, it requires additional configuration entry that allows fllight controller software to compensate for that. But all in time.
One last remark: the frame, even without top plate is super stiff. Very good since it will take serious beating in next weeks. I'm finally learning to fly in Rate mode without auto-leveling. Boy, it's hard. After two 20 minutes sessions I'm able to make a turn...
Read more... -
Adding GPS to Flip32+ and Cleanflight
Flip32 and Flip32+ (10 DOF version of Flip32 with built-in barometer and magnetometer) are nice little flight controllers. And cheap. Some call them clones of Naze32, but this is not completely true. Yes, they are very similar, share the same hardware, but they are not identical. I would say they are better than Naze32 since have more features and are easier to extend. But that is not the topic.
One of coolest features of every drone is GPS support. This allows for both Position Hold and even navigation support. I will not explain how to configure Position Hold and navigation on Flip32+ and Cleanfligh today. The reason is simple: I'm still trying to fully understand PID controllers used in those modes: Pos, PosR and NavR. And it is not going very well I must say. Position Hold in low wind is OK, but navigation and PH in wind conditions is unreliable and I'm still unable to configure it to work well. But GPS even without Position Hold has some use. For example, Home marker on OSD when flying FPV.
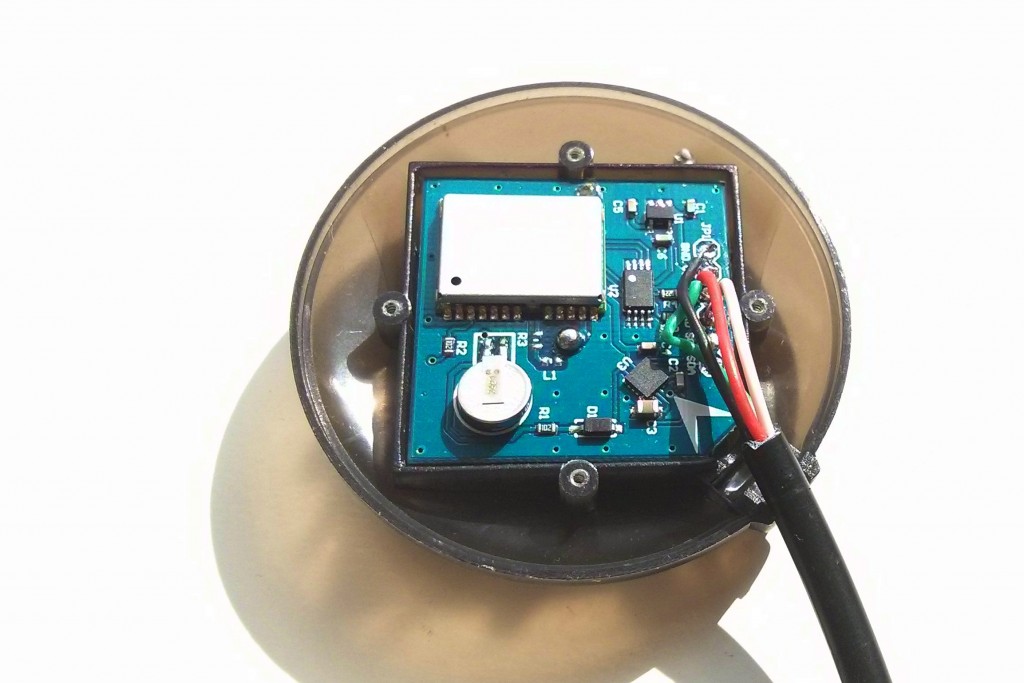 In this tutorial I will use Ublox Neo-6M GPS module, Flip32+ 10DOF and Cleanflight 1.9.0.
In this tutorial I will use Ublox Neo-6M GPS module, Flip32+ 10DOF and Cleanflight 1.9.0. -
Let's build a FPV drone: frame
Many say that small 250 class quadcopter are super fun. Small, fast, agile, tough and crash resistant. I've decided to check it out and build 250 quadcopter drone by myself. And next few posts will be tightly connected with this topic. Let's call it a build log.
The most important part of every multirotor is a frame. It decides about everything. For my quad I've decided to use ZMR250 clone frame made from carbon fiber.
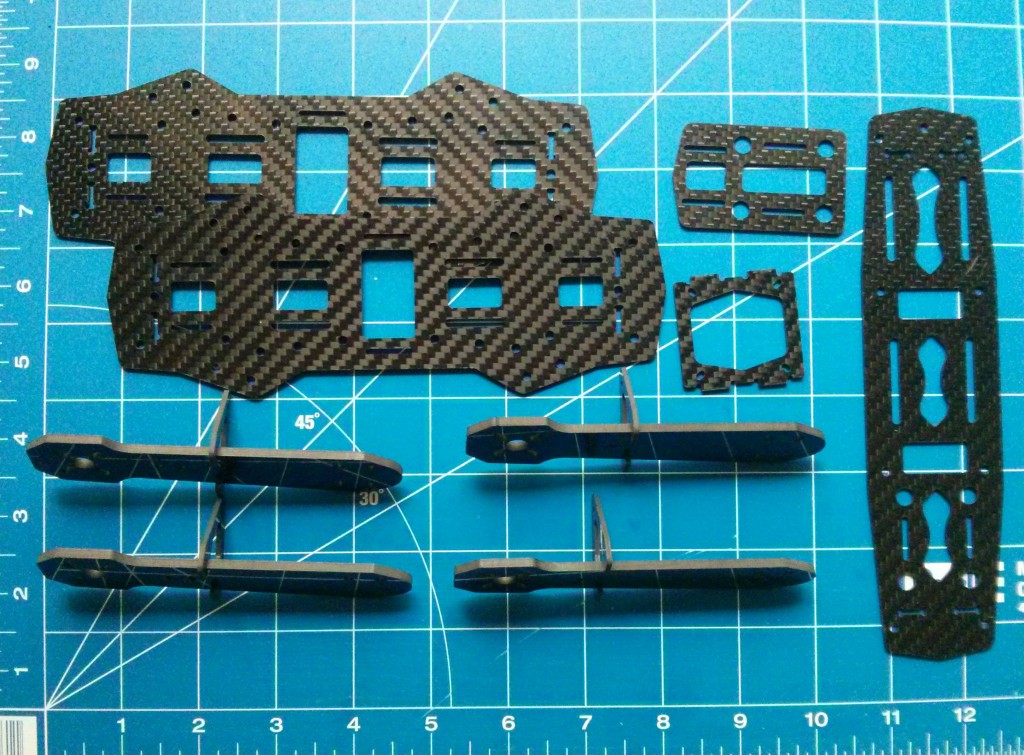 There is also glass-fiber version of this frame, and it's half a price (below $20 while carbon is around $35). So, what do we get for additional $15? We get 2 good things, and one bad. But let's begin with good things:
There is also glass-fiber version of this frame, and it's half a price (below $20 while carbon is around $35). So, what do we get for additional $15? We get 2 good things, and one bad. But let's begin with good things:- carbon fiber is lighter than glass fiber. My frame weights 145g while glass-fiber equivalent weights 181g. 36g might not seem much, but it is a difference after all. In my oppinion a difference worth $15,
- carbon fiber is more durable than glass fiber. At least in theory. So, in theory carbon fiber quadcopter frame should be harder to break during crashes. We will see.
An the bad thing? Well, carbon conducts electricity and can block radio waves. This means, that you have to be extra careful with all the cables and antenna placement. Insulate everything, never leave any cables touching the frame and antennas has to be placed as far from frame as possible. Some kind of mast would be recommended.
Read more... -
I have build a Depron plane...
How hard it is to build a RC plane without plans and starter kits? To do it in "Trust me, I'm an engineer" style. In mid June I've decided to give it a try and right now I can tell: it's hard, but not that hard as one might imagine. All the problems I've faced were faced previously by someone else. I only had to ask right questions, read a lot, and use engineering sens to make plane work.
And well, it works. Way better than I expected it might work. Look for yourself.

It even flies. See the maiden flight video.
-
Adding Bluetooth telemetry to Flip32+ and Cleanflight
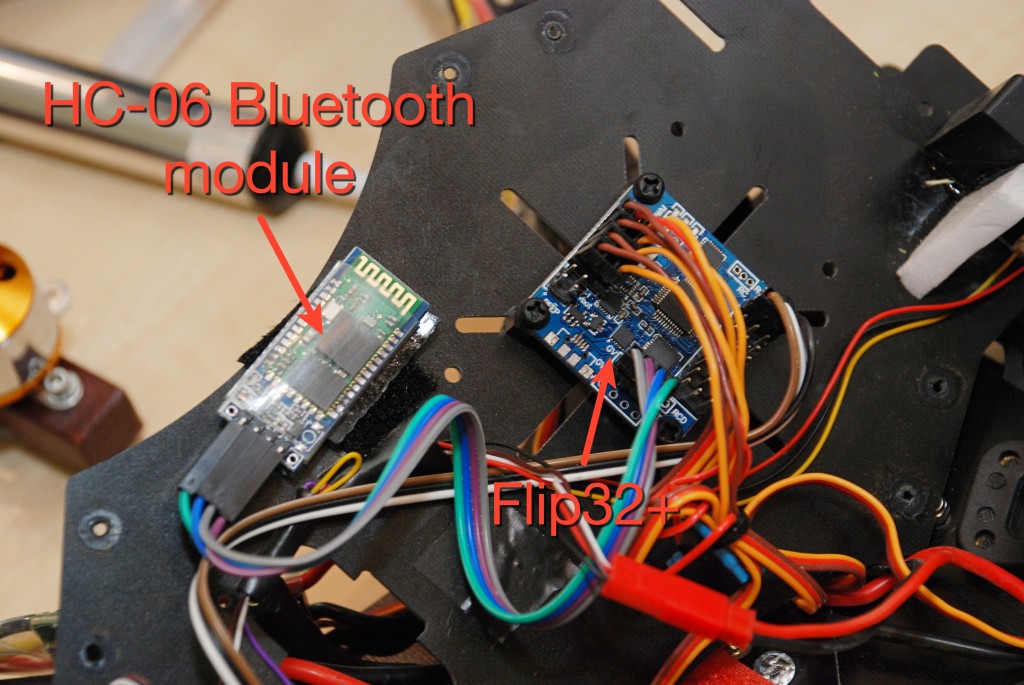
When few weeks I wrote how to solve a problem of broken USB port in Flip32+ flight controller, I suggested that one of the solutions is adding a serial Bluetooth module to provide wireless connection with a bord. And telemetry. Excellent news is: this is pretty simple and cheap.
What we will need:
- Flight controller with soldered UART pins,
- HC-06 serial Bluetooth module, costs below $5 when imported from China,
- USB-to-serial module, for example FTDI FT232RL. This is needed to configure HC-06 to use 115200 port speed,
- 4 wire female-to-female golpin cable.
Read more... -
Simple servo tester with Arduino
Servo tester is a useful little device that is needed specially when you do not have one. I've been placed in a situation like that few days ago what I was trying to connect ailerons with servos on my Depron plane and setup correct control throw. Luckily, I own a few Arduinos, so 15 minutes later I owned a divice like that:
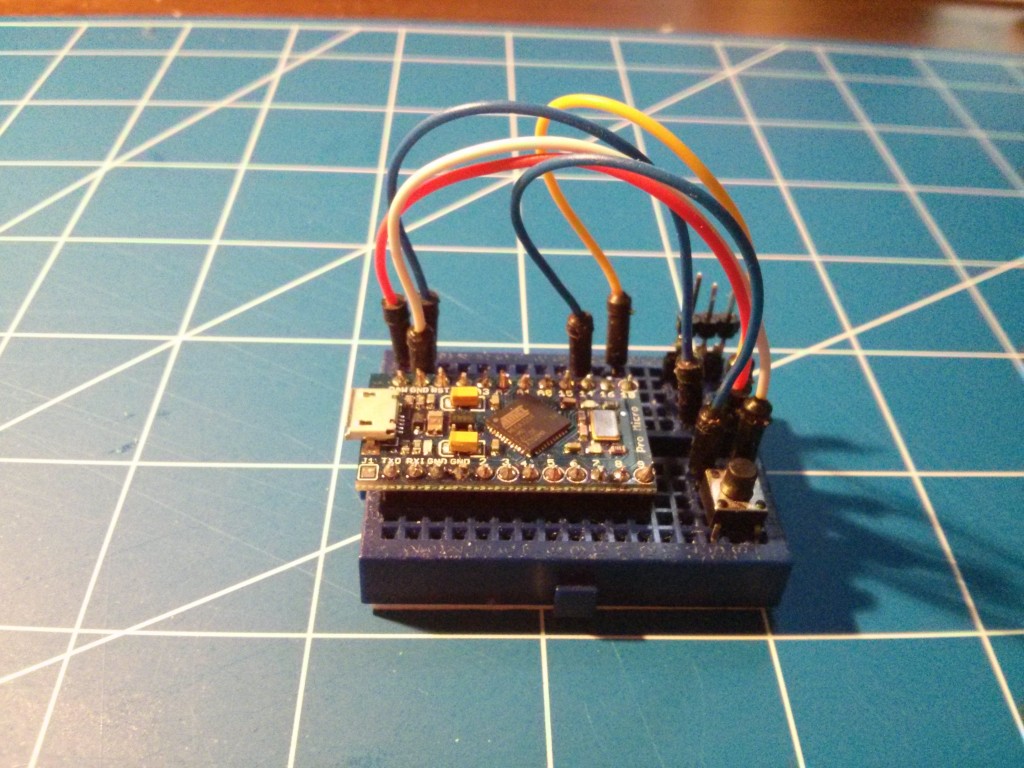
It is an extremely simple servo tester based on Arduino Pro Micoro that can send 3 different PWM pulse lengths: 1000us, 1500us and 2000us. That gives min, neutral and max stick position on RC radios. Perfect to setup control throws and neutral positions.
Required parts:
- Arduino. Any Arduino will do. I used Arduino Pro Micro, but any can be used. Even barebone ATmega328 running internal oscillator on 8MHz,
- Breadboard,
- Tact switch,
- Some golpins to make servo connector,
- Cables.
Electrical diagram goes as follows:
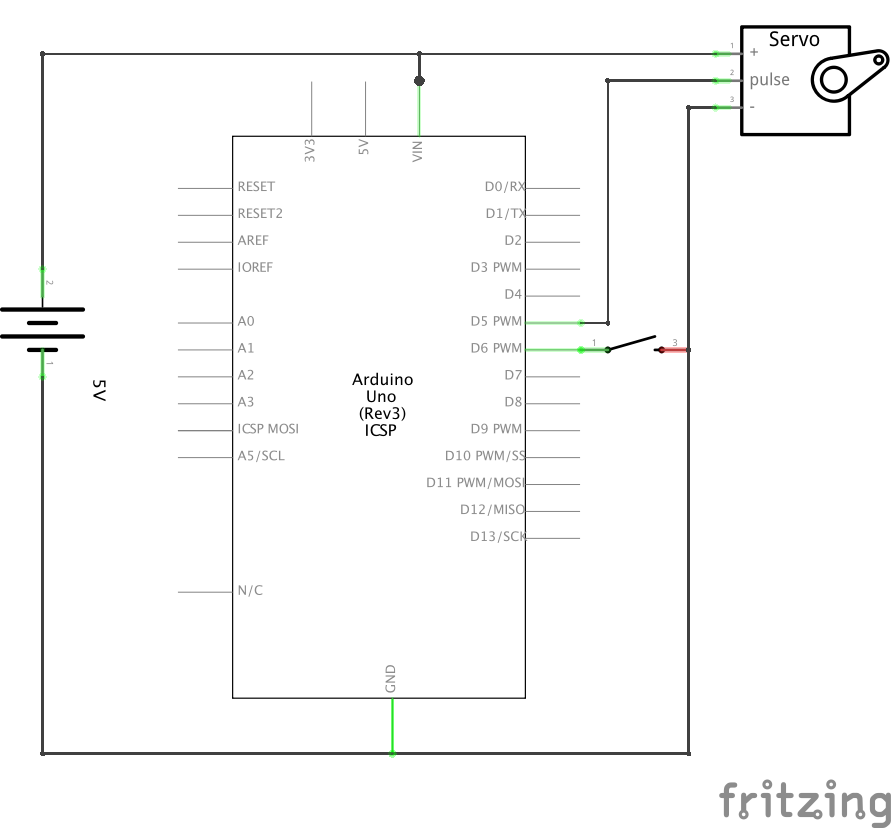
Program is also not complicated:
And at the end, it works like that:
Source code is available on GitHub.
Read more... -
Flip32 with broken USB port
Low price equals low quality. At least usually. I became clear to me (again) when I've broken USB port on my Flip32+ multirotor flight controller. I've pulled USB cable and USB socket stayed on a plug. Cheap solder. Or too quick soldering. No idea. Bottom line: unable to connect to flight controller board using USB cable. To make things worse, quadcopter was not tuned yet. It was flying, but not in the way I wanted it to.
What are the options in this case? Well, there are 3:
- get new flight controller board. Quite expensive since the only thing that is broken is USB port itself. Everything else works just fine,
- resolder USB socket. Might be the best solution, but since it's surface mounted micro USB, it's way above my soldering skills. THT? Why no prob. Simple SMD like resistor? Why not. More advanced? No...,
- use different way to communicate with flight controller.
I've chosen the third way. Flip32 (and Naze32) has build in hardware UART ports (as well as SoftwareSerial) that can be used to establish connection with a PC. Software like Cleanflight already allows you to use any serial port to talk to flight controller. Read more...
-
Flash BLHeli to Afro ESC
SimonK is most widely recognized ESC firmware in multicopter world. But there is a second option, in many ways much better than SimonK firmware. It is called BLHeli. It supports many different ESC, including both Atmel and SiLabs based. Plus, it has a cool software that allows you to configure you ESC without programming card. Just connect your ESC via serial-to-USB interface and you are ready to go.
AfroESC were supposed to be state of the art controllers, SimonK out of the box, easy to flash thank to special USB interface/programmer. And ready to accept different software, BLHeli included. There is only one huge "but". You can buy them, you can buy Afro USB Linker (Turnigy USB Linker is exactly the same), but nobody will tell you how to do it. Number of articles is very limited, and the only useful I've found is this one. So, here we go, now there will be a second one!
How to flash BLHeli to AfroESC
What you will need:
- AfroESC (obvious)
- Afro USB Linker / Programmer
- Windows machine with drivers (keep reading)
- BLHeliSuite
- LiPo battery, the same you use on your drone
-
x525 V3 Quadcopter Frame Review
There are many cheap quadcopter frames on market. Big, small, X, H, foldable, good and bad. And choosing a correct frame for a purpose is both hard and critical for further drone performance. One of cheap, and on a first glance, versatile frames, is x525 V3. Is it worth the money?

Well, it's a hard question. Before I will go to any conclussions, short description of x525 frame.
- Material: glass fiber and aluminium
- Type: X or +, you can choose, it is symmetrical
- Weight: around 385g,
- Size: 525mm
- Integrated landing gear with sping amortization
- Foldable
- Power distribution board
Landing gear is quite clever and should absorb most of impact force in case of hard landing. In theory it is correct, but my experience says that it does not matter. It maybe works in case of normal, controlled landing. But in case of really hard landing, read as crash, it does not matter at all. It is a useless feature that only breaks, adds extra weight and really does very little. After breaking 3 sets of front landing skids, I just replaced them with some steel wire. Does the same, and weights less. Like I said, useless feature. Read more...
-
Dead Rat, wooden quadcopter, maiden flight
Last week I was, finally, able to perform a maiden flight of my DIY wooden quadcopter (here and here). I will not say it was huge success, but it was a success alright. What went like expected? Well, quite alot. First of all, it flies and has enough thrust to weight ratio to do flips and rolls. And is pretty stable in hover. What went not like expected? It is highly unstable on yaw. Really, really unstable. Probably rear propellers are too close to each other and I have to work on PID settings. As soon as I will have enough spare time...
In a mean time, here is a short video from DeadRat's maiden flight:
Final configuration goes as follows:
- Motor to motor diagonal: 500mm,
- Motor to motor front arms: 370mm,
- Motor to motor rear arms: 300mm,
- Materials: 3mm plywood and 15mm wood spars
- Motors: Suppo A2212/13 1000KV
- ESC: XT-Xinte 30A
- Flight Controller: OpenPilot CC3D (clone)
- Battery: Turnigy 5000mAh 3S 25C
- Propellers: Gemfan 1045
- Start weight: 1212g
- Hover time: 21 minutes
Next steps: tune it up and move battery to top. Somehow I do not want to construct a landing gear for it...
Read more...









I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: