FrSky SmartPort Telemetry on AnyFC F7
STM32F7 CPU family present in newest, experimental, flight controllers like AnyFC F7 (as well as upcoming AnyFC M7 with smaller STM32F722) simplifies many things. For example, comparing to F4 boards, SmartPort or S.Bus connection is extremely simple and can be done on any free UART. No more hardware hacks, external inverters and other "special" ways of doing things.
It's super simple again, and here is how to do it in Betaflight (Cleanflight 2.x) and INAV
Hardware
The only required hardware is a cable to connect SmartPort enabled receiver with free UART port on F7 board. This will work on X8R, X6R, X4R, X4RSB, XSR and any other. The trick is to connect S.Port pin with UART TX pin only.

Schematics above shows X4R/X4RSB connector. For other receivers consult manual for S.Port pin and connect it to UART TX on FC.
Betaflight
Following steps works on Betaflight 3.1.7 and above
- Open Betaflight Configurator
- Goto Configuration tab and enable Telemetry feature
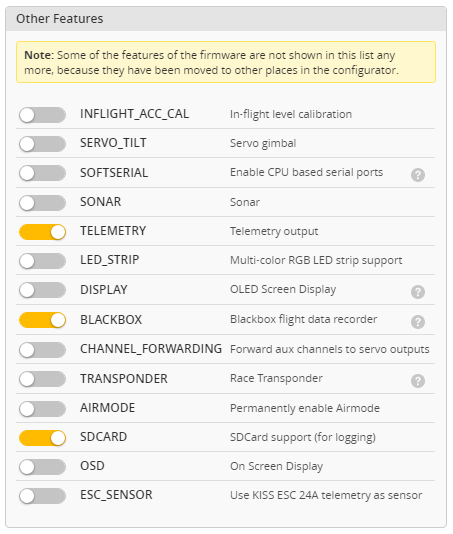
- Save and Reboot
- Goto Ports tab and enable SmartPort on chosen UART. I've chosen UART8, but any other will do
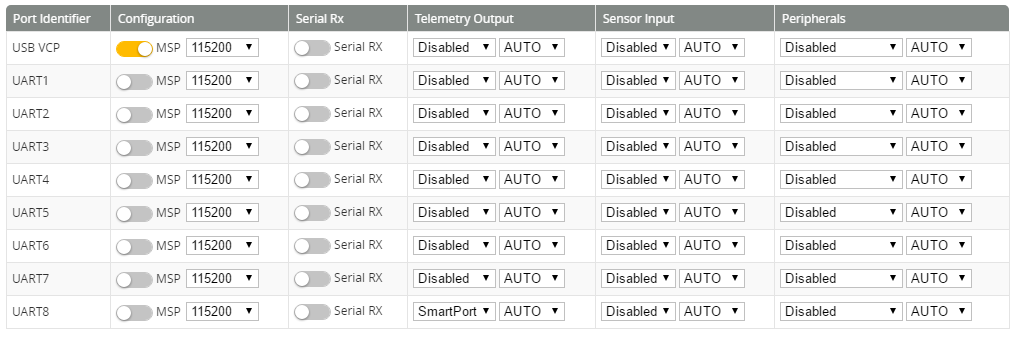
- Save and Reboot
- Goto CLI and type
set tlm_inversion=ONandsave
- Sensors can be discovered in compatible radio: Taranis, Taranis Q X7, Horus, etc.



INAV
Following steps works on 1.7 and above
- Open INAV Configurator
- Goto Configuration tab and enable Telemetry feature
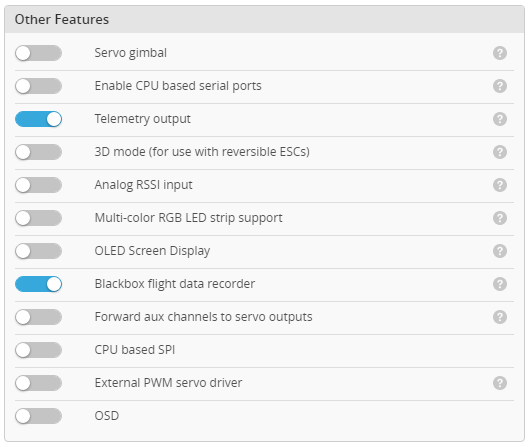
- Save and Reboot
- Goto Ports tab and enable SmartPort on chosen UART. I've chosen UART8, but any other will do
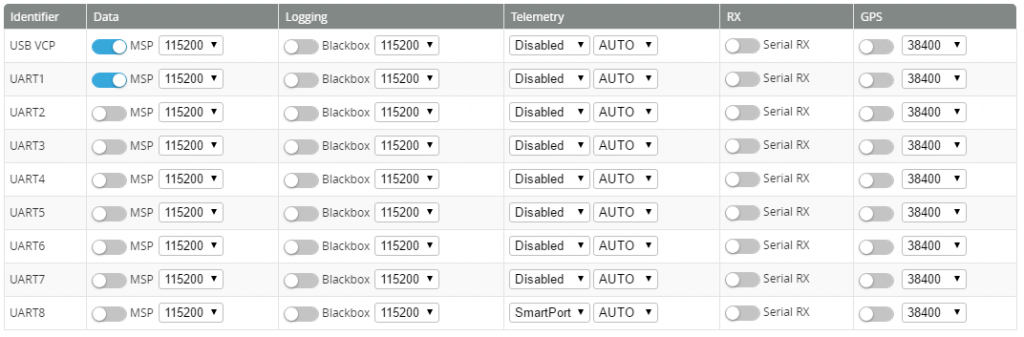
- Save and Reboot
- Goto CLI and type
set telemetry_inversion=ONandsave
- Sensors can be discovered in compatible radio: Taranis, Taranis Q X7, Horus, etc.




I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: