-
Problem: no OSD when camera is connected on minimOSD MW OSD
Problem
When camera and minimOSD are connected to video transmitter, minimOSD is not overlaying OSD data. If camera is disconnected, OSD data is transmitted. After connecting camera, only camera image is transmitted.
Possible Solution
Check if camera and minimOSD are using the same display system. Usually monitor/goggles and video transmitter does not care very much about used display system. Transmitter just transmits, and monitor/goggles very often can detect if signal is PAL or NTSC. But if camera is sending PAL signal, minimOSD has be overlaying imag using PAL subroutine. If it will try to use NTSC mode, it will fail. In case on MW OSD software (Scarab OSD), OSD display system is configured in GUI. Set it to the same system as camera.
Read more...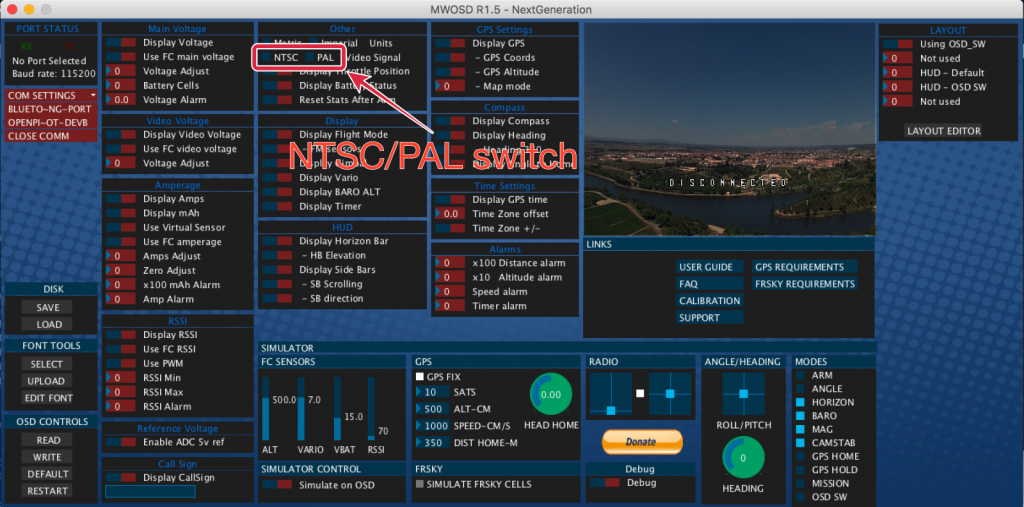
-
DIY FPV LC power noise filter
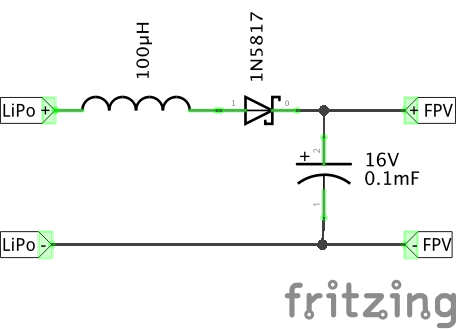
Both electrical motor and ESC are source of electrical noise that influences all devices connected to the same battery. This is why, very often, on airplanes or big multirotors FPV circuit is powered from separate battery. On small or medium drones this can be hard to archive: additional weight will influence both flight performance and flight time. So, when your setup is suffering from a power noise manifesting itself as vertical bars or other image distortions on goggles/monitor, you can do 3 things:
- use separate battery to power camera and video TX,
- cut the noise using LC low-pass power filter.
I would choose low-pass filter. Cheaper and lighter. You can buy one for a few dollars/euros or make 10 by yourself for the same price.
-
Quick review: Turnigy 2730 1500KV brushless motor
I've bought first Turnigy 2730 1500KV brushless motor by accident. I needed something small and cheap for Depron airboat. Then I needed something similar for a Depron airplane. At the end, in 6 months, I owned 3 T2730 1500KV motors. Not all of them survived the experience. One got lost in the middle of a lake with the rest of airboat it powered. Second got burned what I forced it to power too big propeller. Third one still lives and this type is my first choice for anything up too 400g of weight.
-
Raspberry Pi: reset external I2C devices (not only I2C)
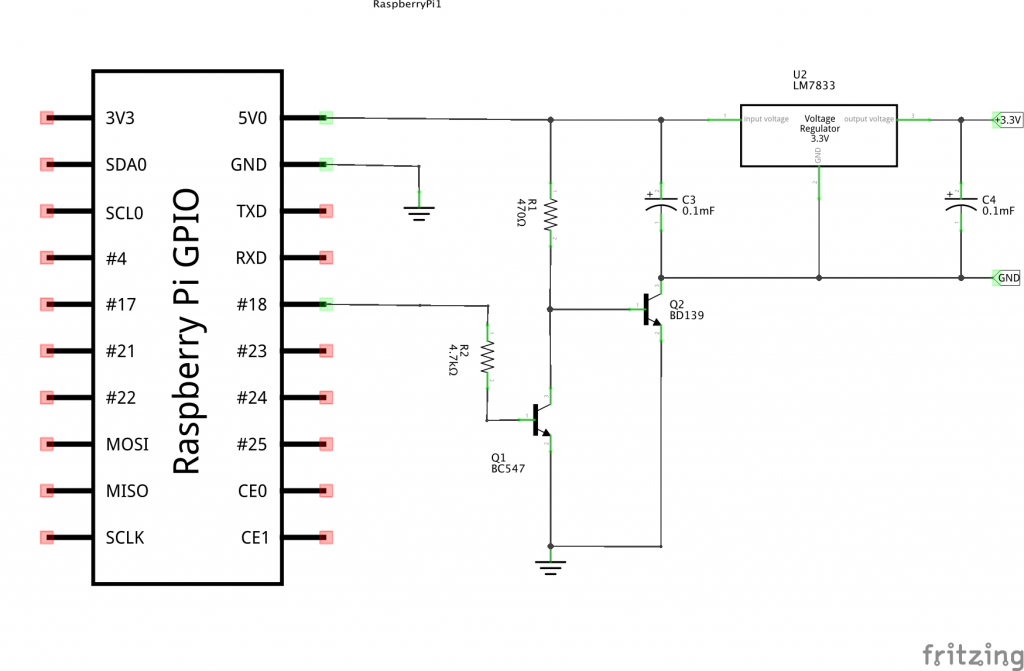
Electronic, and specially computerized, devices likes to hang from time to time. There are many reasons: software bug, hardware error, voltage drop, interference, too long wire, random incident. I've learned this hard way during work on my Raspberry Pi based weather station. From time to time external DTH22 temperature/humidity sensor refused to work. Only solution was to cut power to DHT22 for a second (or less). It was kind of irritating to go the attic, unplug sensor and plug in again. Later on I had similar issues with HD44780 LCD display over I2C bus. Device was hanging and only solution was to cut power. So, I've found a solution: as a prevention cut power for a second every 30 minutes with a simple electronic device I've called "Power Cutter".
-
Detecting Cleanflight PID tuning issues with Blackbox: excess P gain
Almost all quadcopter PID tuning tutorials can be summarized into one sentence: "Increase P until you see oscillations, then lower it". Plus some thoughts about I and very vague advices about D and that is all. When I got into the hobby, I've read all of those tutorials. And I did know more about PID tuning than before that. I even had more questions than before. How to recognize high frequency oscillations, how to recognize low frequency oscillations. Lower P? OK, but how much? And D? How to tune this bloody D? As a result, every time I tried, I ended up with very snappy but shaky quadcopter that maybe responded very quickly to commands, but was very shaky and was making strange noises.
And then came Cleanflight and Blackbox. Live became simpler. What I've learned from Blackbox logs is that I wanted high P so much, I had too much of it in the end. Actual oscillations begins before we see or hear them and excess D introduces jello. Blackbox simplified things, but still, logs analysis is something like an art. You have to know what to look for. Read more...
-
Best drone for Christmas
Christmas is upon us. Less than 2 weeks to be precise. Since drones are such a hot topic, many will want to get one for Christmas, many will want to buy one as a gift. There are so many of them at the market, it's not a problem to buy one. It's a problem to choose correct one, so that everybody is happy. Sure, everybody would like to get DJI Inspire 1 for Christmas, but I do not think that's a point here. So, here are my recommendations for todays question: "What is the best drone for Christmas?"
First drone for indoor flying
They are small, they are cheap, they are almost indestructible and rooms are their natural habitat. Nano drones. Excellent idea for a Christmas present. Cool enought to give joy and cheap enough that it will not be huge loss if they will be thrown into a corner or destroyed after few days. Additionally, low weight, low speed and small propellers greatly reduces chance of destroying something or causing injury. In this category I want to recommend Hubsan X4 H107.

-
Quick review: Eachine PCB Power Distribution Board for ZMR250/QAV250
Building a quadcopter without nice power distribution board always leads to the same result: state of total cable entanglement. It looks ugly, makes maintenance hard and adds unneeded weight. I will not show how my ZMR250 quad looked after I added FPV and OSD into it. Almost all space between top and bottom plate was taken by cables. Nightmare. So, after spending less than $9 I've become an owner of Eachine PCB Power Distribution Board w/ OSD Socket Support NAZE32 CC3D OSD For QAV250 Quadcopter from Banggood. This board did not have very good reviews, but offered three things I wanted: sockets for micro MinimOSD, integrated signal lines and low price. So, I gave it a try.
-
Cleanflight 1.11 is on its way
Looks like there will be a new release of Cleanflight flight controller software before Christmas 2015. Version 1.11.0-RC1 has been tagged 10 days ago. So, maybe even this week if there will be no bugs. What's new in 1.11? No, no Betaflight yet, and no iNav (Navigation Rewrite). Some improvements, new supported hardware (Naze32 Rev6 and RMRC DoDo), some bugs fixed. But with 1.11 some features will be removed as well.
First of all, number of PID controllers has been cut in half. PID Controller 0 (MultiWii), 4 (MultiWii 2.3 Hybrid) and 5 (Harakiri) has been removed and will be no longer available. Why? They were not very popular (maybe besides default PID 0) and they were using precious space in flash memory. This is the most important signal that lifetime of STM32 F1 based flight controllers is coming to an end. Naze32, Flip32 and others does not have enough flash memory to fit all functions.
Second, Autotune has been replaced with G-Tune. I did not tried G-Tune yet, so I have nothing to say about it. I've tried Autotune few times as was not very happy with results. Not only it did not supported PID controller I prefer (LuxFloat), but I also noticed that tuned P value was too high for my needs. So, bye bye Autotune, I will not miss you...
Read more... -
When you want to fix a problem that does not need fixing

When you want to fix a problem that does not need fixing you get yourself into trouble. Like me, trying to tune perfectly fine elevator. Few seconds after take off plane dives and crashes into the ground. Wing and all the gear survived. Fuselage broke in half. Time to manufacture a new one.
Read more... -
PPM output on FrSky X4R and X4R-SB receivers
FrSky sells 2 small Taranis compatible receivers: X4R and X4RSB. By default, they offer only PWM signal. 4 channels on X4R and 3 channels plus S.Bus (16 channels over S.Bus) on X4RSB. And that is problematic. Many flight controllers does not support S.Bus very well (no inverters) or just does not offer enough UART ports. When speaking of small multirotors, PPM signal is often the best choice. That made X4R almost useless. For X4RSB additional S.Bus-PPM conversion cable had to be used.
Luckily, this has changed, since FrSky started offering custom X4R/X4RSB firmware that allows 8 channel PPM signal on receivers port 1. The only thing you have to do is to flash you receiver. And those are the steps to do it:
- Download CPPM firmware from this site. Remember that you need proper EU/non-EU version. It all depends if your Taranis and it's built in XJT module has EU or non-EU firmware. How to determine EU/non-EU Taranis? If you are living outside EU you probably have non-EU firmware. If you are living in EU but bought from non-EU country (China probably) you have non-EU. Also, if in menu you can select D8 or LR12 internal radio mode, you have non-EU firmware. EU firmware allows only D16 mode,
- Follow those steps to flash X4R/X4RSB using Taranis built in port,
- Put a jumper on signal pins 2 and 3,
- Bind receiver with Taranis,
- Remove jumper.
From now on, pin 1 outputs PPM channels 1-8, pin 2 outputs PWM CH9, pin 3 outputs PWM CH 10, and pin 4 outputs either PWM CH11 in X4R or S.Bus on X4RSB. If you want to go back to non-PPM mode, bind receiver again, without jumper on pins 2 and 3.
Read more...








I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: