-
Hands on: Emax SimonK Series 30A ESC
You want to know the secret? I'm cheap. I almost never buy expensive stuff. It's not that I can not afford it and buy cheapest stuff available. In my opinion, both ways are wrong. I buy things that position themselves somewhere in the middle. Not the cheapest, not "the best" and most expensive? Why not the cheapest? Because of very low quality. Why not the best? Because I have to pay a lot a little of additional quality or performance I do not really need. And things in a middle usually provide enough for reasonable price. For me it makes sense...
Thanks to GearBest I've received a set of EMAX SimonK Series 30A ESC for a review. They are not the cheapest 30A ESC for multirotors. You can easily buy some no-name for almost half a price. You can also but "the best" for almost twice as much. But are they worth the price? I will try to find out in the next couple of weeks while using them on my 600mm quadcopter.
"Unboxing"
EMAX SimonK Series 30A ESCs are packed in antistatic bags with a user's manual in Chinese and English.
-
iNavFlight 1.1 has been released
Few hours ago official release of iNav 1.1 has been published. Comparing to few month old version 1.0, there were many changes, including few very very important. In my personal order of importance they are:
- Default settings for Position Hold and Return To Home has been retuned, so they behave almost perfectly. Take a look at videos I've been posting here from time to time. Outstanding performance on defaults!
- There is only one PID controller now. It's is called FP-PID and I already wrote few words about it here
- GPS signal handling has been greatly improved. Both number of satellites and well as HDOP should be rock stable now. Previous versions had a tendency to loose signal from time to time
- Fixed Wind airplanes support
- Waypoints
- Surface Following mode using Sonar.
- Single page OLED Display showing useful data instead of many screens showing all available data
- HeadingLock mode that helps UAV to keep desired heading even with external forces and applied. It does not require magnetometer! I will try to write few words on this topic soon
- New 4-way BLHeli passthough interface
- Cleanflight Configurator reports HDOP fix quality instead of number of satellites now
- GCS NAV Follow me mode to be used together with EZ-GUI
- Many, internal changes and small features that makes iNav experience really incredible!
Happy flying everyone!
Read more... -
Flight with iNav and HC-12 433MHz based telemetry link video
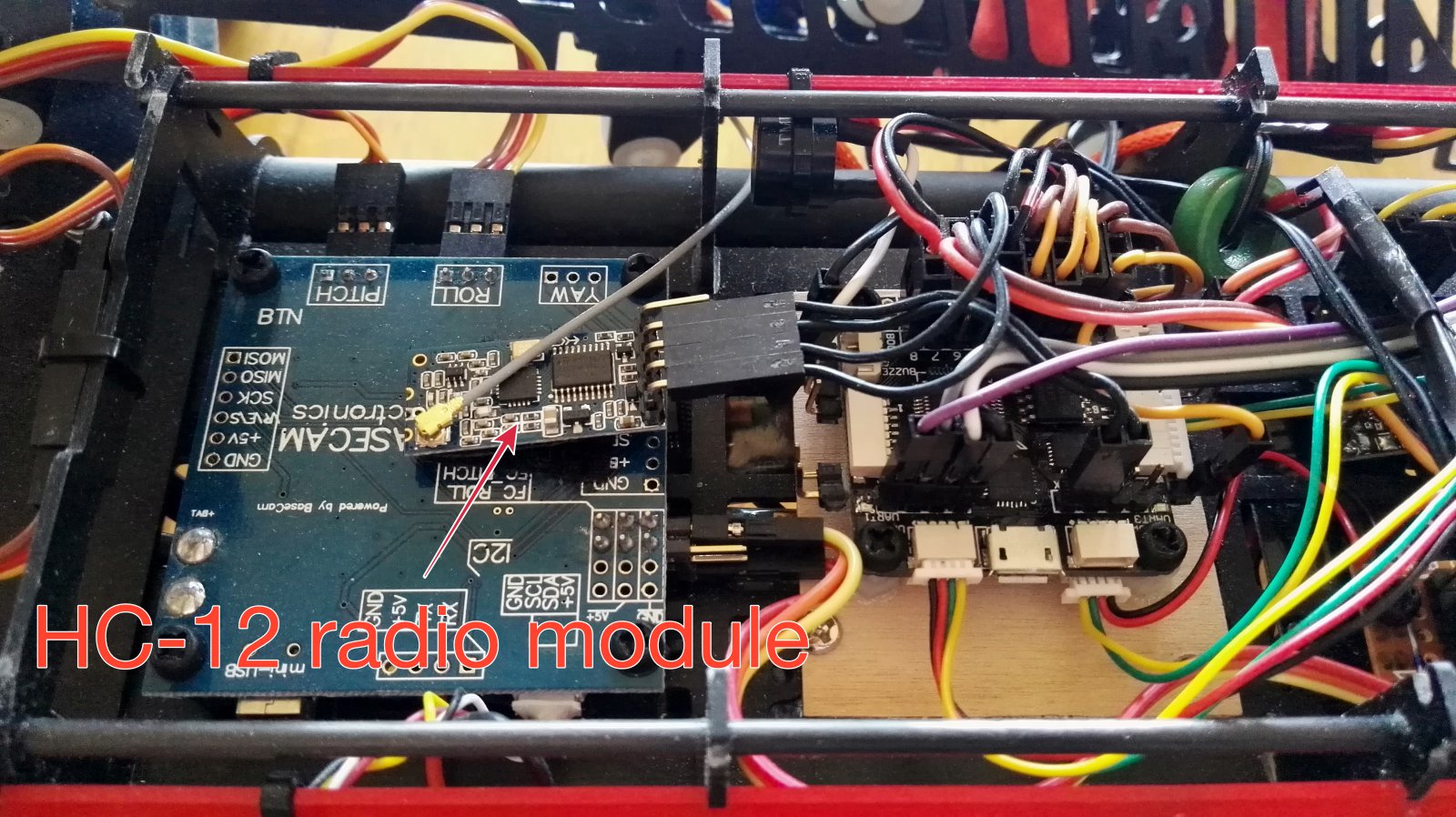
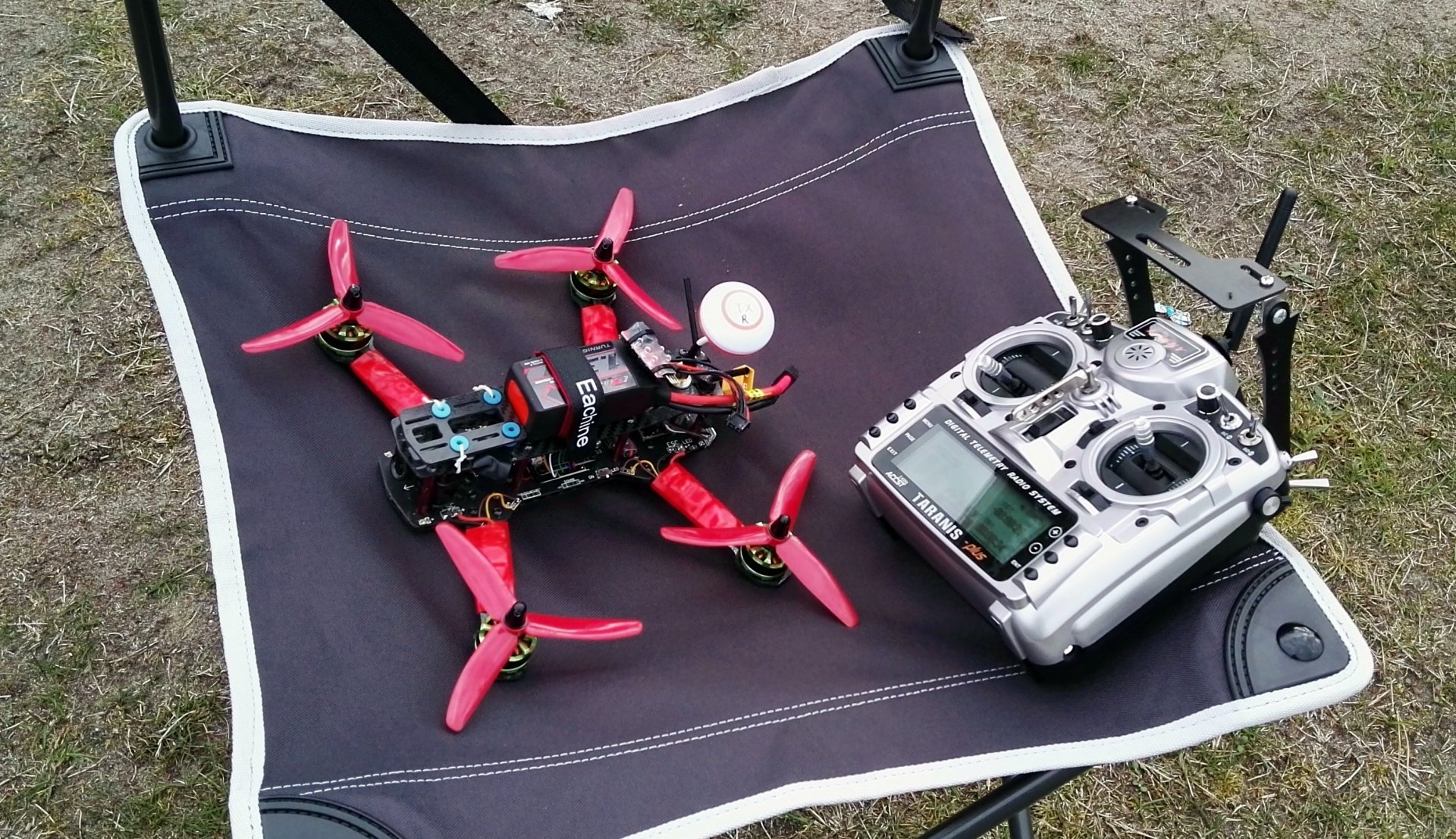
In my last post about HC-12 RF modules I showed my DIY telemetry rig for UAVs and quite promising result of 450m in open space. Today I post edited video of that flight. Most of the time it is Acro mode. PosHold and RTH are engaged in second half video material. Weather was rather windy with strong gusts, specially on altitude above 15 meters.
Quadcopter in controller by SPRacingF3 running iNav pre-1.1 with Beitian BN-880 GPS module and BMP-280 barometer.
Read more... -
HC-12 433MHz RF serial module range test
As I mentioned in my first post about HC-12 433MHz radio modules, I've put my interest in them for telemetry purposes. While S.Port telemetry I'm using in FrSky Taranis radio might have higher range than HC-12, it is closed environment. Since $10 for a pair of HC-12 is not much, I've decided for more open DIY solution.
Setup on a quadcopter consist of one HC-12 configured for FU3 mode and baud rate 9600bps connected to SPRacingF3 UART3 port and "air cooled" (shortened with a coil) 433MHz whip antenna. Well, to be precise, it's 450MHz since I changed working frequency. Antenna is not tuned or scientifically computed. Just 433MHz version shortened a little using proportions. Antenna is mounted on GPS mast. In next version I will probably replace whip antenna with Vee antenna.

-
The best way to mount LiPo on a drone: 3M Dual Lock
LiPo battery, as the heaviest single element of any racer quadcopter, is mostly the first one to fell off during crash. Or displace in high-g maneuvers. Or simple fell off in flight. Like on this picture below I've found on Reddit. Grrrr... for sure this is something I would like not to see personally again. And I've seen it on my first build based on X525 frame.

So, solid and strong battery mount is a must. Battery strap for sure. Even few in case of heavier ones. But battery strap is not enough. LiPo can always slip out. To prohibit that, I've been using velcro strips and it worked fine. But velcro has a few drawbacks: it is not very strong connection, allows some movement, and looses strength after some time. Few weeks ago I've discovered something that is way way better than regular velcro: 3M SJ3550 Dual Lock Reclosable Fastener. Read more...
-
Drone vs. passenger airplane
Let's be honest here: some drone pilots are stupid and fly very close to airfields. Big commercial airfields with tons of passenger traffic. Why? Ignorance, lack of knowledge, craziness, lack of imagination or just plain stupidity. On the other hand, commercial airplane pilots see drones everywhere. Few weeks ago grand hysteria: drone hit a plane at Heathrow. Who did it? Why? Laws should be more restrictive! Two days later: do, drone did not hit anything. So, what pilot reported? Probably it was white plastic bag. Eh...
The main problem with drones and commercial air traffic is that nobody know what would happen if for example DJI Phantom would hit Boeing 747. We more less know what happens when a goose hits one. It happens quite often. We also know when happens when a turtle hit and airplane on runway. Yes, it happens too. Hey, we even knows what happens when frozen chicken hits windshield. But drone? "Keine Ahnung" like Germans would say.
Now there is chance our knowledge on that topic would improve. EASA, European Aviation Safety Agency, decided to create a task force that will investigate potential results of drone-airplane collision. It will:
- investigate incidents
- analyze existing research
- investigate weak points of airplanes: windshields, wings, engines in context of UAV collision
- consider the possibility to do further research and perform actual tests
First results should be available at the end of July.
Read more... -
Make your drone stands out with insulating tape
Everybody knows that red is the fastest color. Ferrari has proven that years ago. With red Turnigy Graphene LiPos I've bought recently, I've decided to make my ZMR250 quadcopter stands out a little. In a cheap and dirty way: if I have red battery on top of ZMR250 and I can buy a propellers in almost any basic color, why not to go one step further?
Idea of making the whole drone red was in my head for a second, but it died a sudden death. Paint would not do. Too fragile and too effortful. Instead I've visited a hardware store and purchased color insulating tape. They come in different prices, sizes, qualities and of course colors. Classical black, green, blue, yellow, red, etc.
At home I've applied red tape around arms and ESCs. That also allowed to get rid of zip ties that I used to hold ESCs in place before. They were not good. Insulating tape is not only stronger by also protects ESCs better from dirt and water.
Effect? Quite nice, I like it very much. Red props (DAL T5040 that I will review soon), red arms, black carbon and Turnigy Graphene are looking nice together. And this ZMR250 for sure no longer looks like regular ZMR250. All for just a few cents worth of insulating tape!
Read more... -
Hands on: RunCam Swift FPV Camera
Life of my previous FPV camera was rather short. RunCam PZ0420M died after a crash only few weeks after purchase. Well, it happens. As my next camera I've chosen RunCam Swift for following reasons: I like RunCam, Swift is small and it has double mount! 50 dollars and 4 weeks later it arrived.



-
HC-12 433MHz wireless serial communication module configuration
Description
HC-12 are cheap 433MHz wireless serial port communication modules with a range up to 1800m in open space. They are SI4463 based. Each costs about $5 when bought from China, and 2 of them can create wireless UART link that can be used, for example, to transfer telemetry data from UAV. Or drive IoT device. Or connect sensors. Or whatever else one can think of.
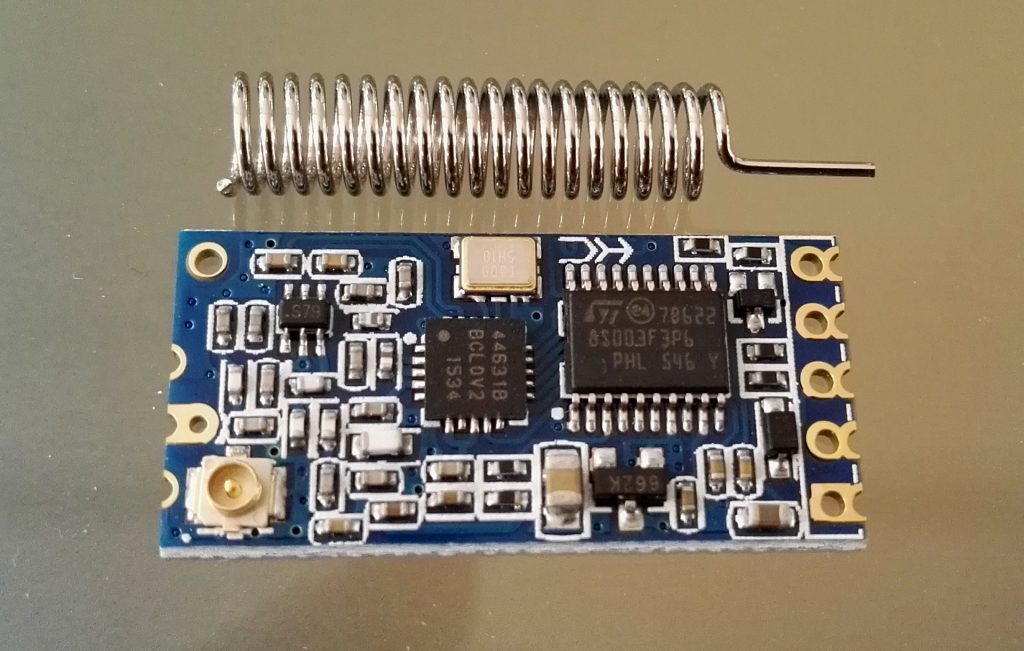
It is based on SI4463 RF chip, has built in microcontroller, can be configured using AT commands and allows to use an external antenna. Working frequency is divided into 100 channels starting from 433,4MHz up to 473,0MHz with 400kHz channel separation. Maximum output power is 100mW (20dBm) and receiver sensitivity differs from -117dBm to -100dBm, depending on transmission speed. It accepts 3,2V-5,5V power supply and can be used with 3.3V and 5V UART voltage devices (5V safe). Read more...
-
Setting up iNav on 250 class racer
Although iNav (iNavFlight) with advanced GPS and navigation support is best suited for larger, GPS equipped drones, there is absolutely no reason not to use it on something smaller like 250 racer. Why? Well, why not? Basic flight mechanics is the same like in Cleanflight or Betaflight. FP-PID is brand new PID controller, not very popular and not very well documented, but in many ways superior to LuxFloat. The way it handles D term is just outstanding. It can be pushed very, very high without introducing noise.
OK, it has a drawback. High computational requirements and floating point logic causes users of STM32F1 based flight controllers like Naze32 or CC3D can forget about looptime 1000us. 1400us is all those boards can do. On the other hand, looptime 1000us (or even 500) is quite new thing introduced and made popular only about half year ago. And people were racing before that somehow... So, 2000 is not that bad after all. Good thing SMT32F3 board are strong enough not to have to worry about this issue. So, let's go! Read more...






I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: