-
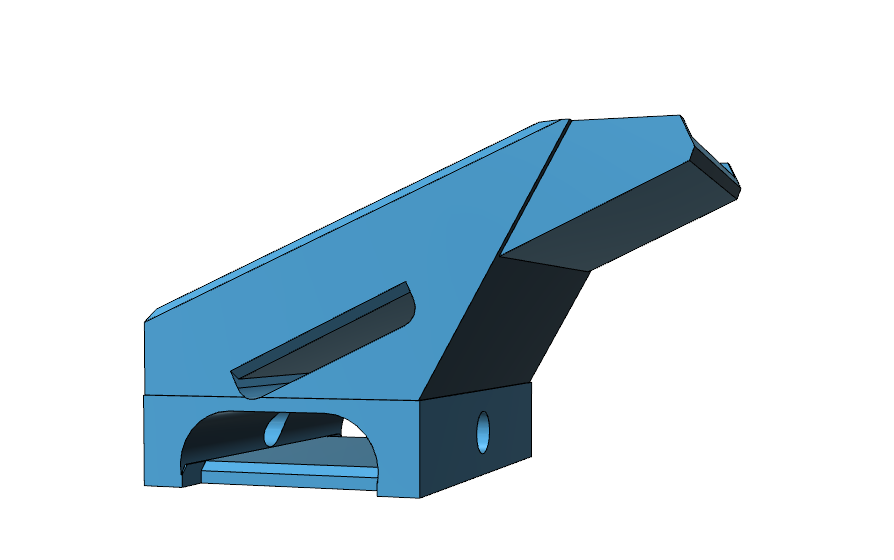
3D Printed RunCam HD / Mobius camera mount for Reptile X4R 220
After I finished my new Reptile X4R 220 racing mini-quad, I've realized, that there is no way I will be able to mount my RunCam HD on it. Comparing to ZMR250, 220 frame is just small. On a top plate there is enough room to fit battery, RC and FPV antennas and all what is left is around 35mm in the front. Plus, with angled FPV camera, there just no place for RunCam HD/Mobius form factor cameras. So, some time with 123D Design and few hours of printing, and here we are: 25 degrees mount for RunCam HD and Mobius camera specially designed for Reptile X4R 220 frame
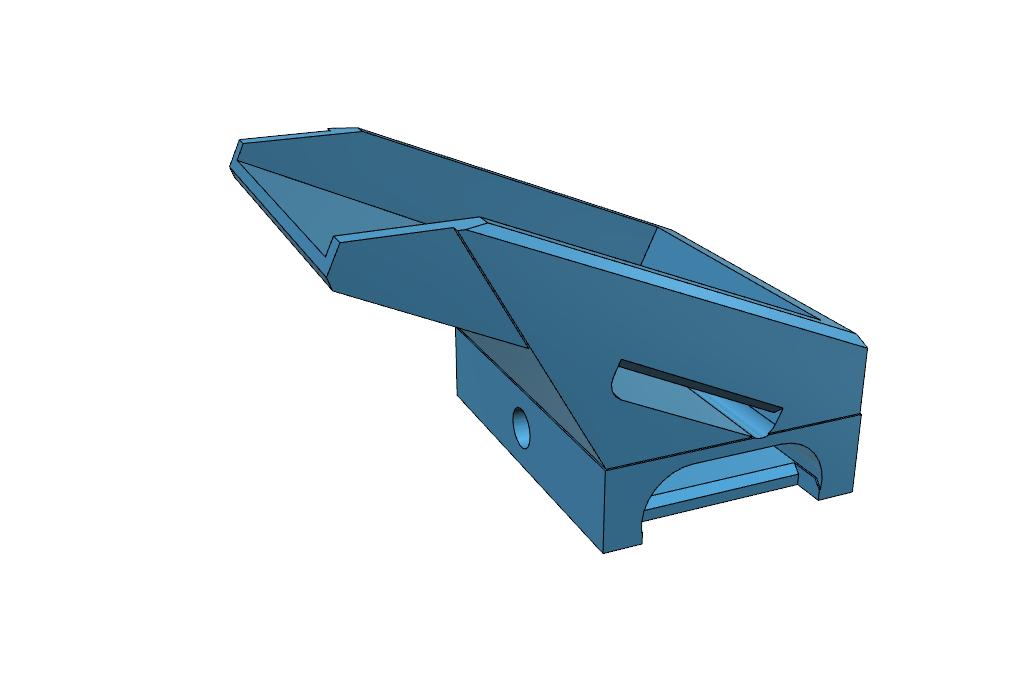
This mount has 25 degrees inclination, will fit both RunCam HD and Mobius (not sure about RunCam HD2...) and its base is only 42x32mm. So it can be installed on small frames like 220. But, it will also fit bigger. No problems here.
The best way to install it on a frame is to use either zip ties or double sided velcro straps. There is a slot for 20mm wide velcro straps. To make it better, use 3M Dual Lock between.
To securely install camera also use 3M Dual Lock and use a velcro strap too. That should keep everything in place just fine.
Read more...
-
Flyinglemon AIR32 STM32F3 flight controller
It was a good week for flight controllers from Poland. Few days ago ROTORACER showed his RACEBASE FC, yesterday Flyinglemon showed his AIR32 STM32F3 board. Comparing to RACEBASE F3 it is maybe less advanced in terms of integration, but not always more is better.

AIR32 features:
- integrated 5V step-down 600mA BEC compatible up to 6S
- SPI connected MPU6000
- 2 external UARTs
- Spektrum Satellite connector
- hardware FrSky S.BUS inverter
- VBAT, RSSI, WS2812 LED output,
- Boot tact switch
Board is supported by latest Betaflight 3.0 (still in RC phase) and special build of Betaflight 2.9.1.
Now, I'm waiting for a week of new F4 boards...
Read more... -
ROTORACER RACEBASE FC
Only a few days ago I've written, that new STM32 flight controllers are appearing every few weeks. Weekend goes, and here we go again, this time it's a STM32F3 (STM32F303CCT6 ) based board from my Polish compatriots from ROTORACER called RACEBASE FC.
Main features:
- SPI connected MPU6000 gyro (allows 8kHz update frequency)
- 36x36mm form factor
- integrated BEC allows 2S-4S battery direct connection* integrated power filter (LPF) for noiseless FPV setup
- integrated MAX7456 based OSD with RSSI, battery level and PID tuning capabilities
- 64Mbit flash
- runs Betaflight
Read more...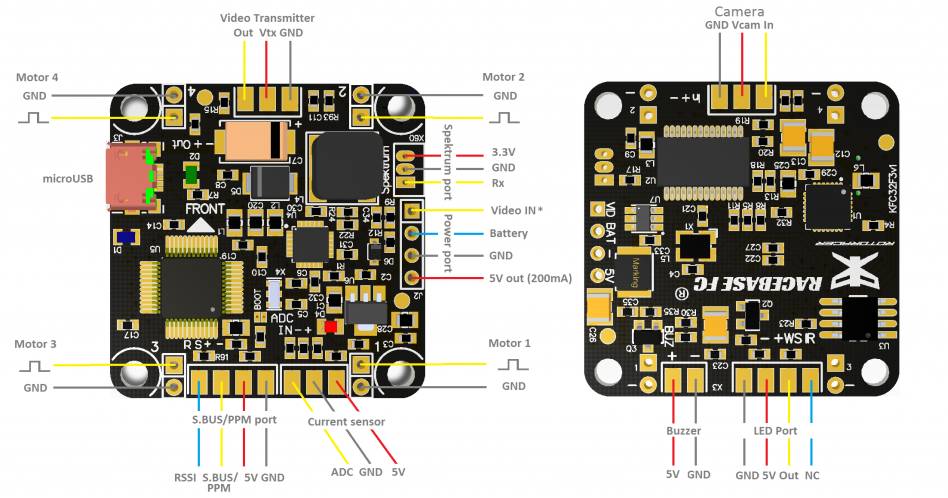
-
Hands on: Reptile X4R 220 quadcopter frame
Last week, first parts for my new racing quadcopter started to arrive. One of them, was carbon fiber frame: Reptile X4R 220. Why this one? Like I stated many times: I'm cheap. Plus, I did not wanted to go with another ZMR250 build. This frame was easily available, within budget and good looking. So, few weeks later, here we are...

Specification:
- 220mm motor-to-motor
- Weight: 120g
- 4mm carbon fiber arms
- 2mm carbon fiber bottom plate
- 1.5mm top plate
- 35mm aluminium standoffs
- adjustable camera mount (fits HS1117 and RunCam Swift)
- integrated power distribution board (PDB) with 5V BEC

After 2 evenings with this frame, I'm almost finished with a build.
Pros:
- overall quality is good
- everything fits, no need to ream holes, sand or cut anything
- more nuts and bolts than required

Cons:
- top plate are rather thin. I would prefer 2mm top plate or maybe 2.5mm bottom plate too
- power distribution board is an structural element of whole frame. If you want to use different PDB (I wanted to use Matek PDB-XT60) you might have a problem. Some improvisation will be required
- In theory, each arm is kept in place by 3 M3 bolts. In theory... In practice, one of those bolts enters nylon standoff. Not metal nut, but nylon. So, instead of 3 bolts per arm, it is only 2.5 bolts or even less... too bad... Still, whole build is rigid enough...
Read more...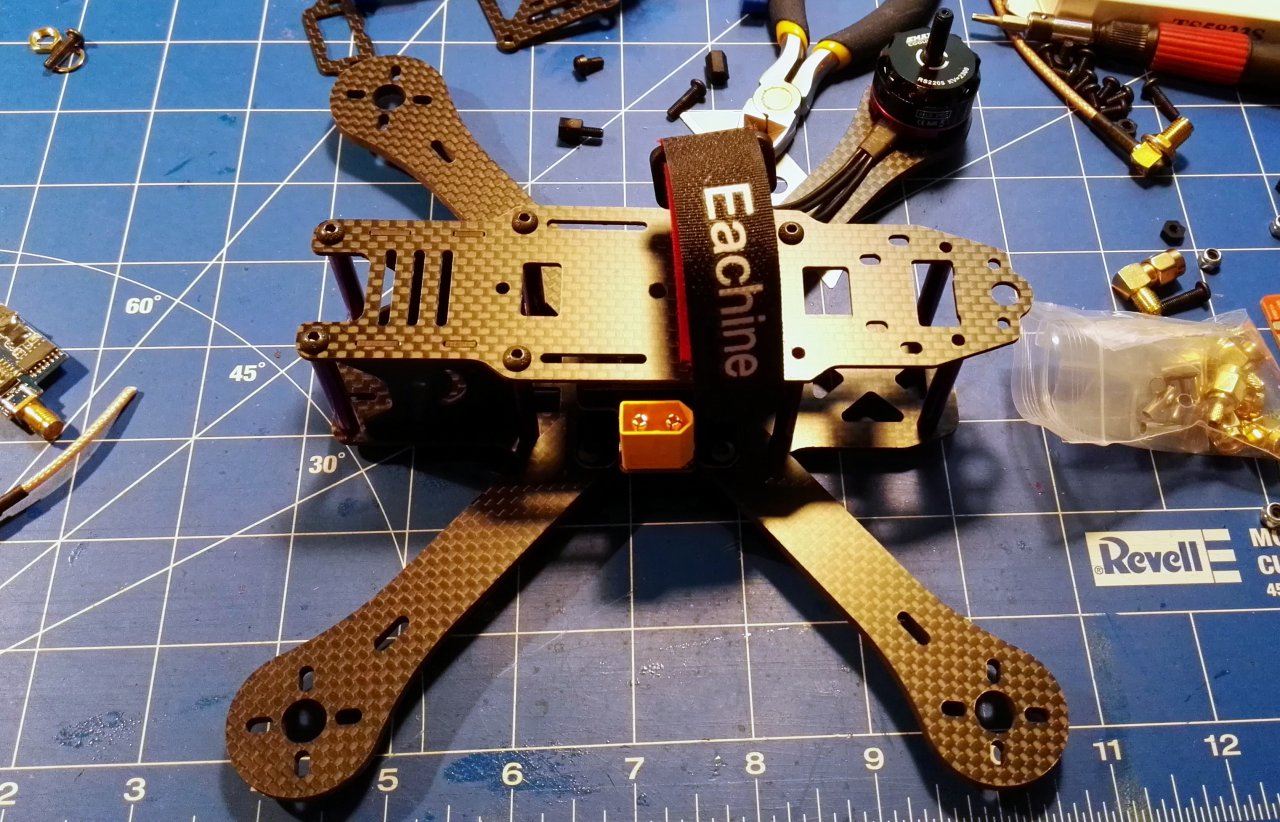
-
INAV: unsynced gyro updates
Until recently, INAV concentrated on GPS and navigation support. Comparing to Betaflight, or even Cleanflight, its acro capabilities were rather limited. Flyable, but limited. Now we are trying to catch up. While upcoming INAV 1.2 will rather not change much in this topic, there are few experimental code versions that might greatly improve INAV acro capabilities. One of them is separation of gyroscope readouts from PID loop.
INAV and FP-PID with extensive floating point logic are rather slow. Looptime 2000us (500Hz update rate) is a limit for F1 targets and 1000us (1kHz mode) is barely reachable by most F3 targets. Version from mentioned above pull request separates gyroscope readouts and filtering from main PID loop. Thanks to that, gyro is updated much faster (up to 2.6kHz in case of F3 with I2C gyro). Faster gyro update means better signal signal quality, lower delay, better filtering and less aliasing. One the other hand, motors does not have to be updated that often. Not only they are unable to change rotation speed as fast as we can drive them, they are unable to notably change thrust as fast as we would like them to.
Read more...
Let's do some math: what will the distance that tip of a 5" propeller running 12,000PRM will travel during 500us (2kHz update frequency)? About 40mm. More less 10% of a circuit. Not much distance to change generated thrust... -
10% discount for Chickadee Polystack
Extra, extra, read all about it! No, really, I have quite important notice. Thanks to Scott, all QuadMeUp readers have 10% discount for Chickadee Polystack products with a QUADMEUP10 code. Code is valid until Thursday (08-04-2016).
Read more...
-
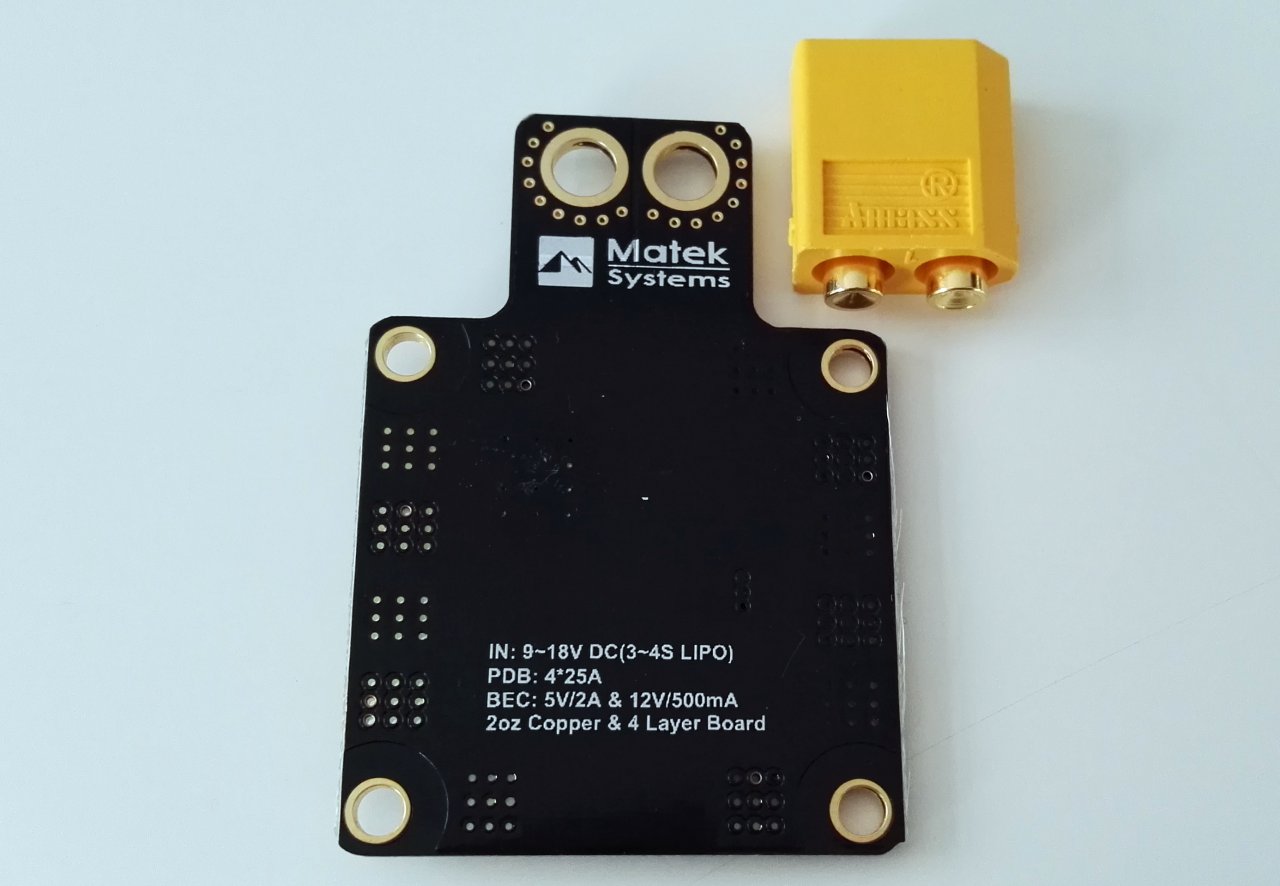
Hands on: Matek PDB-XT60
As long as quality is decent, there is nothing better like "el cheapo" electronic components. Just like below $5 Matek PDB-XT60 Power Distribution Board with integrated 5V and 12V BEC. Preparing to build a new 220 racer I just got my Matek PDB from Aliexpress.

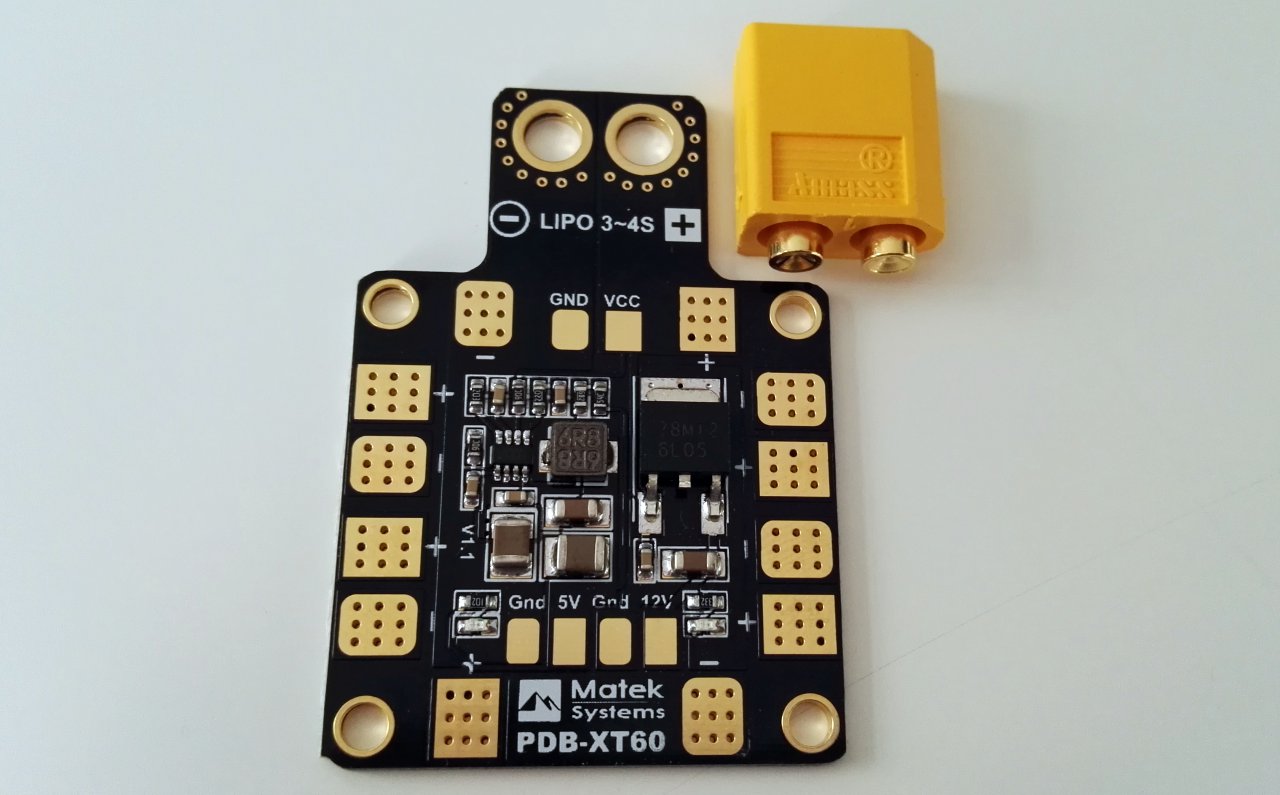
Quality, at a first glance looks good. Laminate nicely cut, soldering of BECs looks good. All pads are yellow (I will not say gold on purpose). According to specs, max current that can go through it is 5*25A. That is strange, since it has connectors for 6 ESC. So, let's assume it is 100A in total, and in a quadcopter configuration, each ESC can draw up to 25A. In case of hexacopter it would be 16A.
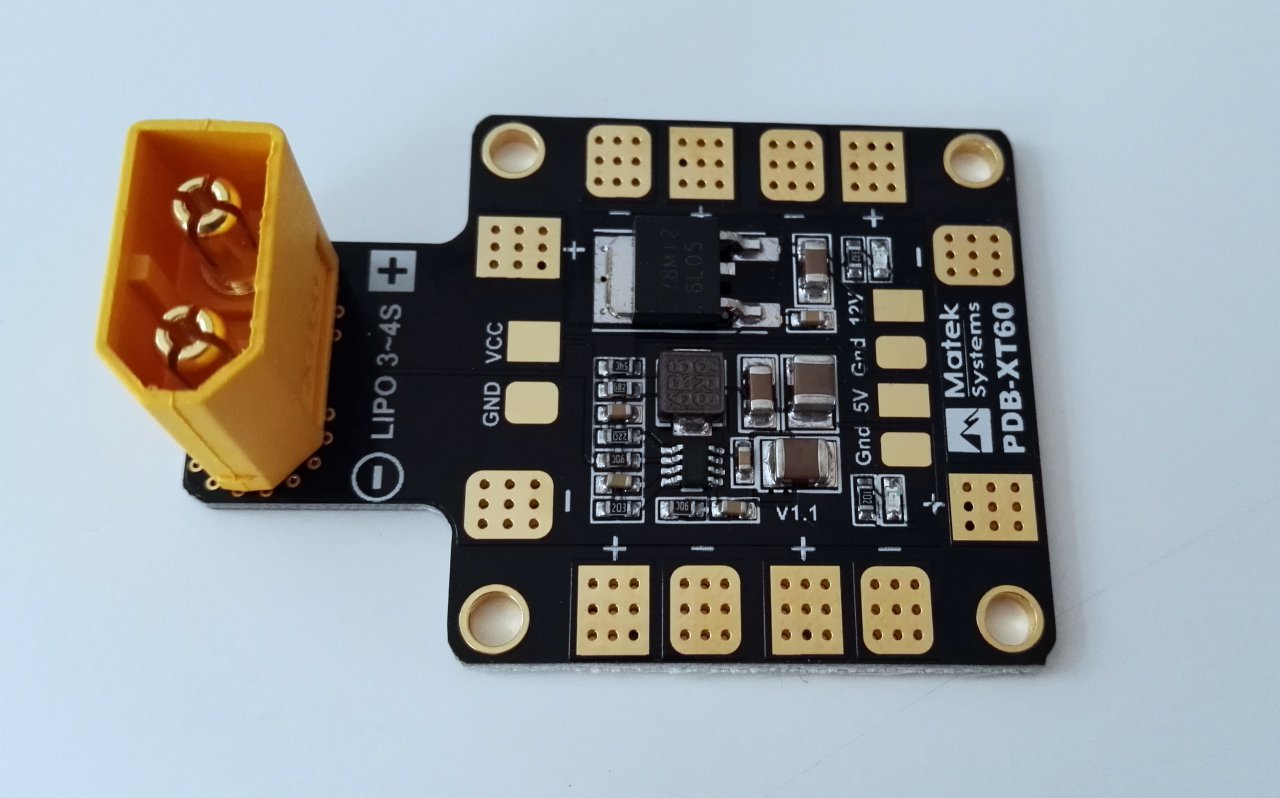
5V BEC is a switching step down with 2A max load, while 12V (0.5A continuous load) line is based on LM7812 linear voltage regulator. And that means the following: it does not makes any sense to use 12V BEC in case of 3S. With 2V dropout voltage of 7812, on 3S it would supply 10.6V on fully charged battery and 8V when LiPo cells are at 3.3V. On the other hand, FPV gear accepts voltage starting from 7V so, if needed, 3S can be used after all.
So far, so good. Now I wait for the rest of components to arrive. I hope soon...
Read more... -
How to print PLA on glass?
When I got my first 3D Printer (Malyan M150) and got into 3D printing I was surprised how consumer not-ready technology this is. Sticking, not sticking, overextrusion, underextrusion, Kepton, blue painters tape, clogged extruder... Over the time, at least, I was able to get the whole 3D Printing process somehow repeatable. I think one of the most important changes I've made in my 3D Printing experience is to ditch Kepton and blue painters tape in favor of printing PLA on glass. Process got simpler, faster and with better results. Also, not counting initial investment, cheaper.
-
Detecting Cleanflight PID tuning issues with Blackbox: gyro noise
After a short brake, let's return to Blackbox series with new entry: "How much gyro noise is too much?".
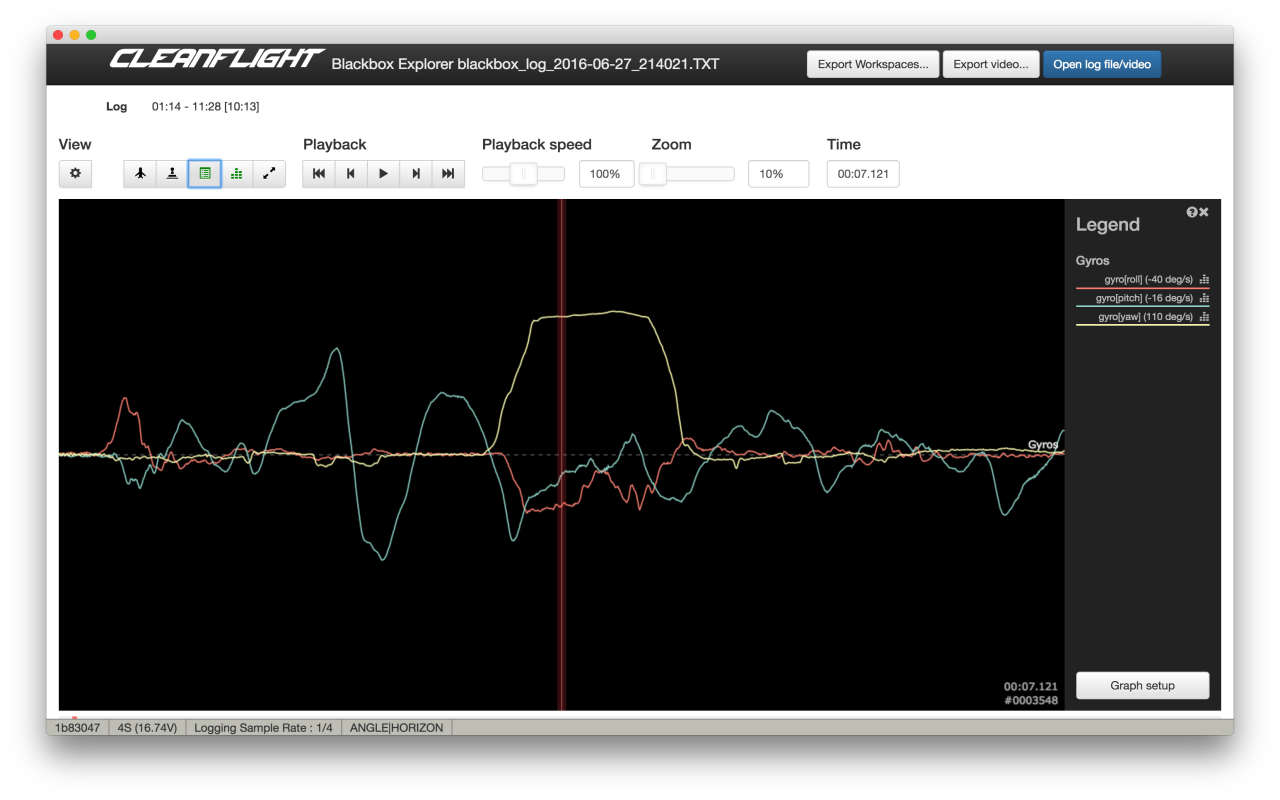
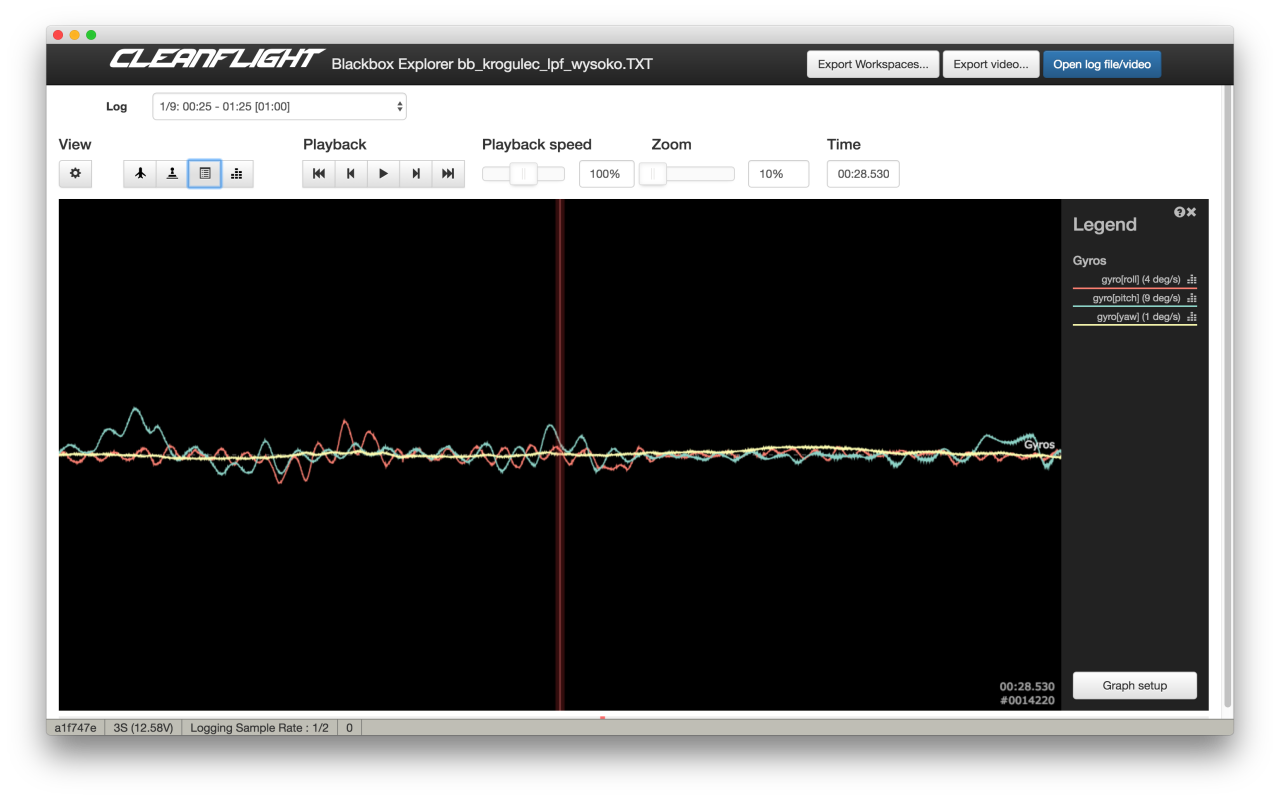
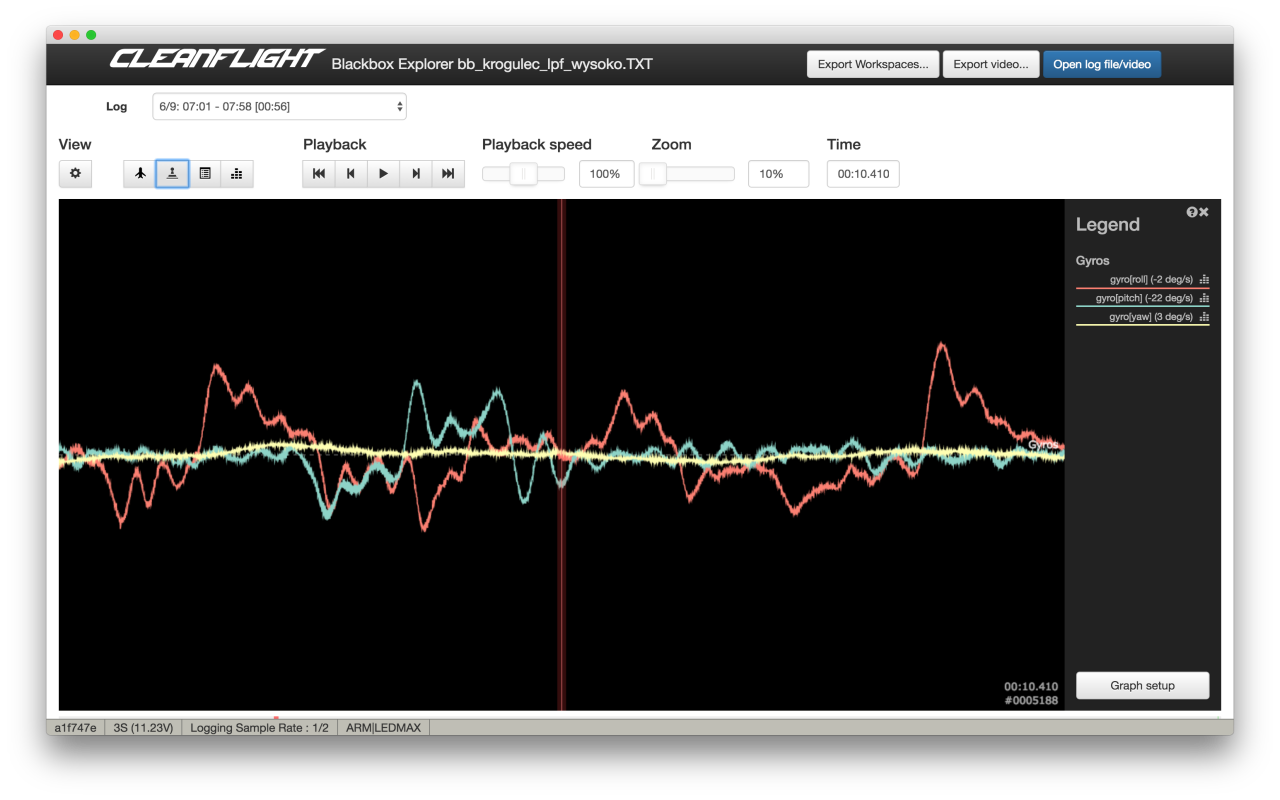
Almost all PID tuning tutorials states: reduce vibrations that affects gyroscope and accelerometer readouts. Yes, this true: any vibrations that appear during flight affects gyroscope and accelerometer readouts are bad and should be kept as low as possible. This can be done by balancing motors, propellers, using stiffer frame, adding dampeners, lowering LPF filters. But how much vibration induced gyro noise is too much? Let me answer with four Blackbox screenshots:
Super smooth gyro traces, no noise
This is how it should looks like! Perfect trace. If it is archived without lowered LPF filters, then kudos for balancing everything!
Somehow noisy gyro traces
Little noise appears, but amplitude is low, everything is under control.
Noisy gyro traces
Gyro noise is visible. It is not a problem yet. If it was a result of raised LPF cutoff frequency, extra noise might be worth lowered signal delay. I would start to think how to reduce it on a hardware level. Perhaps bearings are dying, or propellers should be rebalanced?
Extremely noisy gyro traces

This is how unflyable gyro noise level looks like! If you see have problems with flight performance, you know what is causing it. This have to be fixed ASAP before everything else.
Read more... -
How to tune PID I-term on a quadcopter
With this entry I want to initiate short series of articles showing how to tune multirotor / quadcopter PID controller. Let's call it a continuation of Blackbox series, but this time I will not relay only on Blackbox data. Yes, I will show few examples how given scenarios looks on Blackbox logs, but all steps will be doable without Blackbox.
Before we proceed, you much understand how PID controller works and what
Kp aka. P-gain,Ki aka. I-gainandKd aka. D-gainare responsible for. There are many sources: Wikipedia, my "What is PID controller article", great video from Bruce and many many others.How to tune I-term of PID controller
Most PID tuning tutorials suggests to start with P tuning and then move to I. Why? Probably because it's simpler to get UAV in flyable state. Or because P is first letter on PID. Or I have no idea. Starting with I has some advantages:
- tuned I-term will not affect much more important Pterm tuning
- it is simpler to tune I than P if proper method is used
- tuned I-term will probably not change during P and D tuning
Before we proceed, a reminder of what
I-termis used for and short characteristic of it:- I-term is responsible for correcting long time error accumulated in the past: non-even thrust from motors, wind, etc.
- I-term should not be affected by short events like few degrees attitude correction
- I-term should should react fast in special conditions like upside-down phase of rolls and flips
- bigger I-gain not only means that correction will be stronger. What is more important, it also determines how fast I-term would change!
- too low I-term causes multirotor unable to keep desired attitude. UAV will bank on its own, be sensitive to wind
- too much I-term will introduce overshot, visible low frequency oscillations, wobble on descend
- gentle, smooth flying for aerial photography requires much lower I-gain than aggressive acrobatic flight
- better UAV balance (center of thrust close to center of gravity) results in lower required I-gain
- usually, due to weight distribution, pitch axis requires more I-gain than roll axis
There are two methods of manual I-gain tuning:
- Tuning for smooth, aerial photography, flying with bigger drones
- Tuning for acrobatic flying with smaller drones (250 size and smaller)
How to tune I-term for smooth flying, aerial photography style
General rule for I-gain tuning for smooth flying on bigger machines (8" or bigger propellers, > 1kg) is to keep
Ias low as possible. Multirotors like these are not designed for acrobatics, or aggressive flying. Their main purpose to to be stable in hover or cruise and do not wobble on descend. Higher I-gain, due to bigger (sometimes huge) inertia of both body and propellers will result in overshooting, wobbles and oscillations.- Start with weight balance. Center of gravity should be as close as possible to point of thrust. Simple procedure looks like this:
- For pitch and roll axis find a line that crosses the frame between two point lying in the middle between motors opposing this line
- Try to lift multirotor using two fingers catching centerplate where line crosses it
- If frame tilts forward, move some weight (usually battery) back, if frame tilts left, move some weight right, and so on
- This does not have to perfect, but the closer you will get, the better flight performance you will have
- Tune roll and pitch separately. Ignore yaw for now, this can be tuned much later and usually it is not required to tune yaw at all!
- Tuning has to be done in Acro/Rate mode, without self leveling!
- Start with default PID gains. In most cases they are good enough for hover. If drone is able to take off and does not wobble on its own, you are good to go. If it is sluggish, wobbles, tilts on its own, increase P gain in 20% steps until it is hovering without much trouble. Remember, we are not tuning P yet. We just want it to be flyable.
- Throttle up and do a fast ascend for few meters. Then cut throttle to about 25% and descend fast. Observe what is happening to a drone. Three things can happen:
- If drone is unable to keep attitude and tilts is any directions, I gain on this axis is too low. Increase I gain and repeat experiment
- If drone keeps attitude, but wobbles on descend, I gain is too high. Decrease I gain and repeat
- Try to keep I gain lower than higher. That means you should concentrate on finding a spot closer to a point where UAV is unable to keep attitude that to the point where wobble appears
- If drone keeps attitude and does not wobbles on descend, I gain is tuned
- Confirm I-gain tune by doing forward-backward and left-right fast flights. If multirotor is able to keep angles, does not slowly drift or slowly wobbles during braking, congratulations, you tuned I-gain for smooth flying!
On a Blackbox log, wobble during fast descend might look like this:
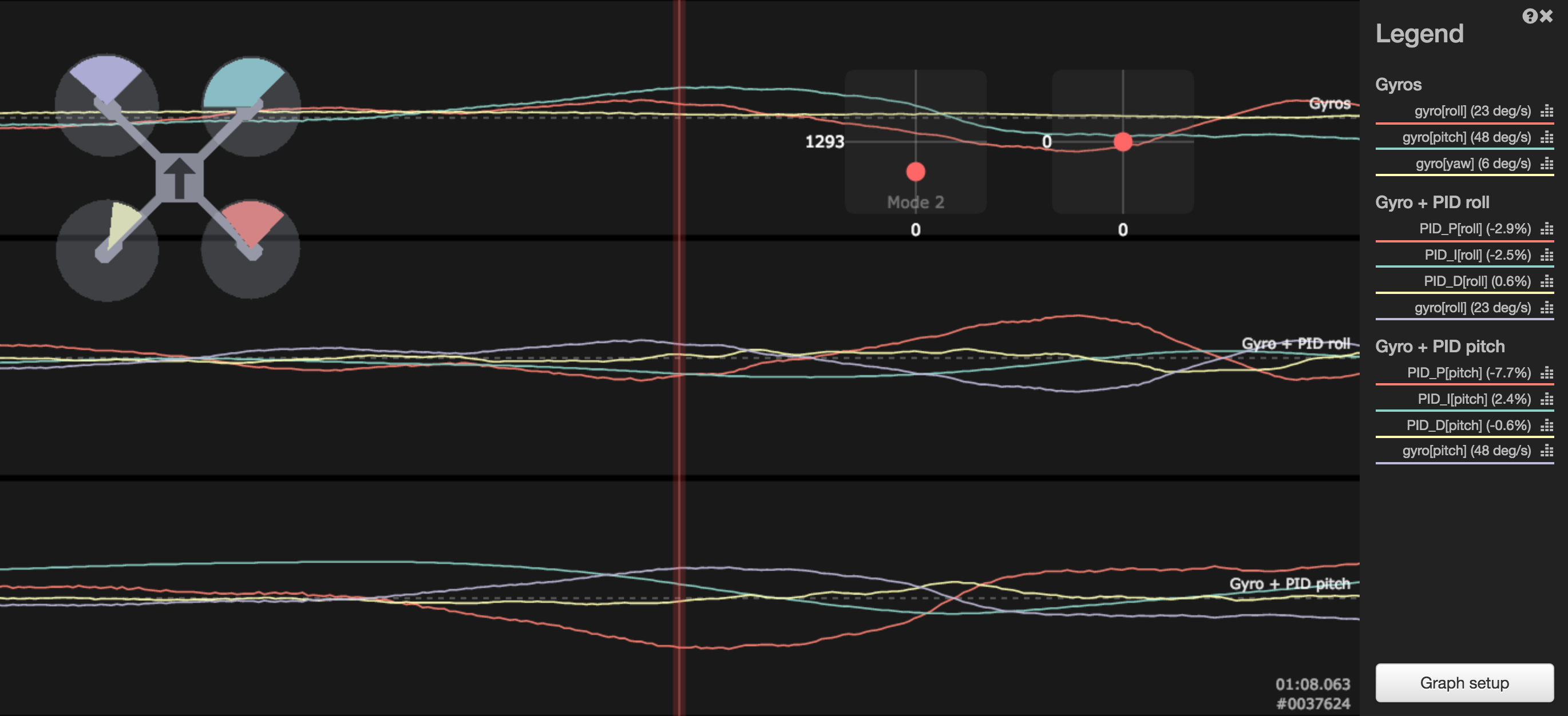
Both axises: roll and pitch were affected in this case, but bigger wobble appeared on pitch axis, up to 45degrees per second! If you take a look at pitch PID graphs, you would see that I-term moved from more positive, to negative and then to positive again.
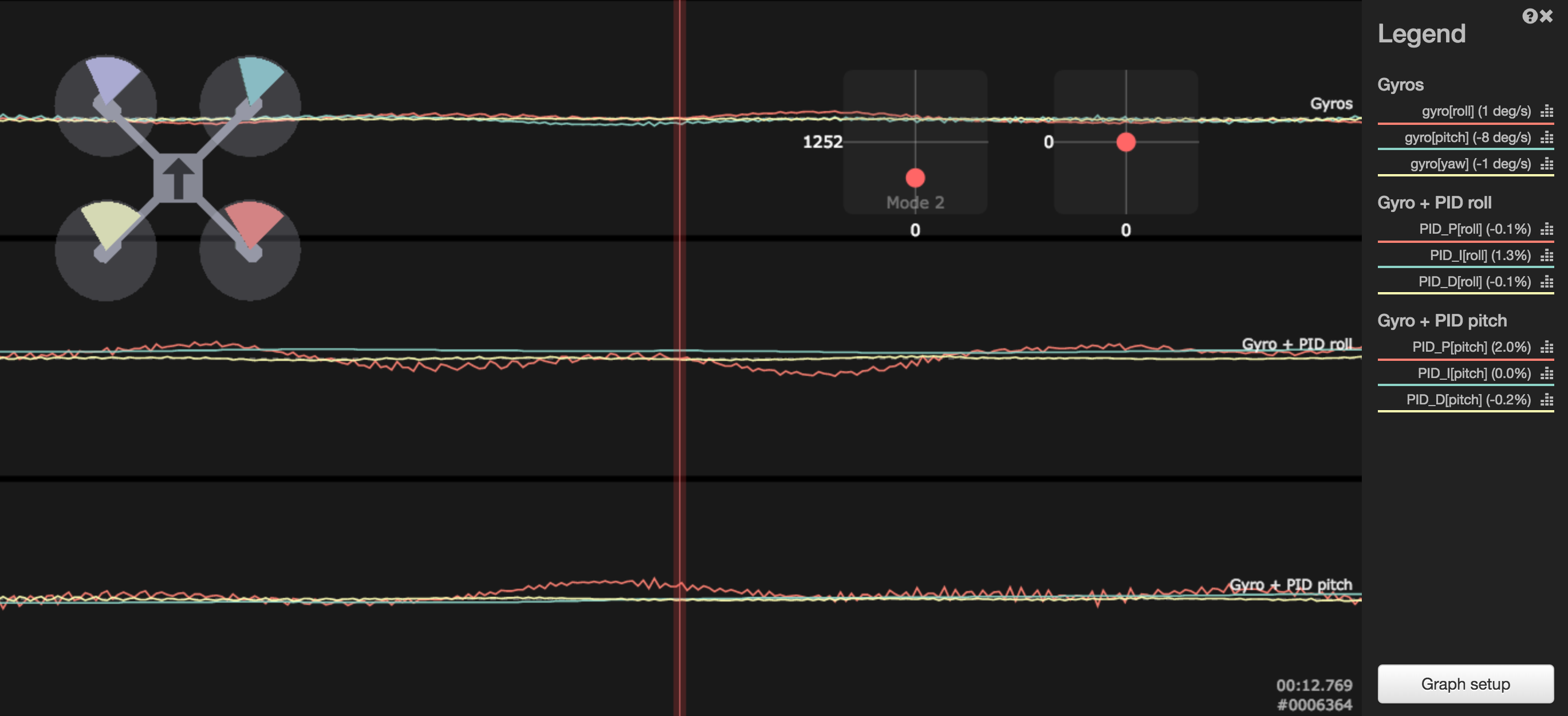
P termtried to compensate, but it had to fight not only with changing conditions, but also with changing I term after original movement has been canceled out. This might not a be a perfect example, but shows general principle.This example show what is happening in similar situation when I gain is much lower. I term stays more less flat, most of the work is done by P term.
How to tune I-term for acrobatic flying
If you would tune I gain using procedure from previous paragraph and went doing some rolls and flips, you would notice something bad: when copter crosses 90 degrees and begins upside-down phase, single wobble, a strong jerk, appears. Like I mentioned before, I gain does not only determines correction force. It also determines allowed speed of change when conditions changes. Imagine a copter that is slightly tail heavy. That means motors in the back have to spin slightly faster than those in the front to compensate for weight imbalance. I term does that very moment you take off and it works as long as you do not try to bring everything upside down very fast. If rear motors would still bring more trust that forward motors when drone is inverted, it would not compensate for weight imbalance. It would make thing worse than better. Our imaginary tail heavy multirotor needs less thrust in the back when flying inverted.
Flips, rolls and all other rapid maneuvers requires higher I gain to allow for faster I term change. If I term is unable to follow strong changes, single wobble or multiple wobbles would appear when passing magical 90 degrees inclination.
Another problem with method from previous paragraph is that small machines are much more wobble on descent resistant than big ones. Smaller, faster rotating propellers, less inertia, more agile. One would really have to push I gain very high to see strong wobble during descend. And it still not would do good for acrobatics. This is why, on those machines, try the following
- Balance multirotor like above
- Start with default PIDs
- Use only Acro/Rate mode
- Tune each axis separately
- Take off and check UAV stability during fast ascends and descends
- If it keep attitude but wobbles, lower I gain
- If it does not wobbles, but does not keep inclination, rise I gain
- If it does not wobbles and keeps attitude, we can move forward
- This step does not have to be very precise. As long and it keep inclination, you are good to go
- Go high. If you have FPV, this helps a lot. If not, just pay attention to drones behavior
- Do a fast single roll. If during transition to inverted flight (around 90 degrees) multirotor jerked, I gain is too low and I term is unable to follow the change. Raise I gain on axis and try again. The hardest thing here is to decide which axis is responsible for jerk. Sometimes it is single axis, sometimes both roll and pitch together: FPV helps a lot with this. If you really do not know, rise both. Repeat this step until roll is smooth, without visible wobble
- Do the same during flips. If you did everything right in previous step, this is only to confirm everything works like expected
- Confirm there are no wobbles during fast descends. If they appear try lowering I gains a little
Small note: I gain that allows for smooth transition to inverted flight flight depends on rotation speed and imbalance. The bigger imbalance and faster the rotation, the higher I gain would be required. So if you change rates, you might want to repeat I term tuning.
Read more...























I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: