-
Hobbyking Mini DLG Pro 990mm durability fix
Entry level DLG (Discus Launch Glider) from HobbyKing has a quite important flaw for a "entry" level model: it is not durable. As a matter of fact, it is quite fragile, specially where plastic nose section is attached to composite fuselage tube. It is attached only with 3 small screws, and I can guarantee: every harder landing will result with something broken. During 3 first weekends with my Mini DLG Pro, I had to glue it back together every second flying session.
Those 3 screws are just not stron enough to keep everything together, so I've decided to fix it with epoxy glue and I suggest all new owners of this DLG do it at the beginning. Thin layer of epoxy put everywhere where plastic meets fuselage tube is enough. It make glider strong like it should be from the beginning.

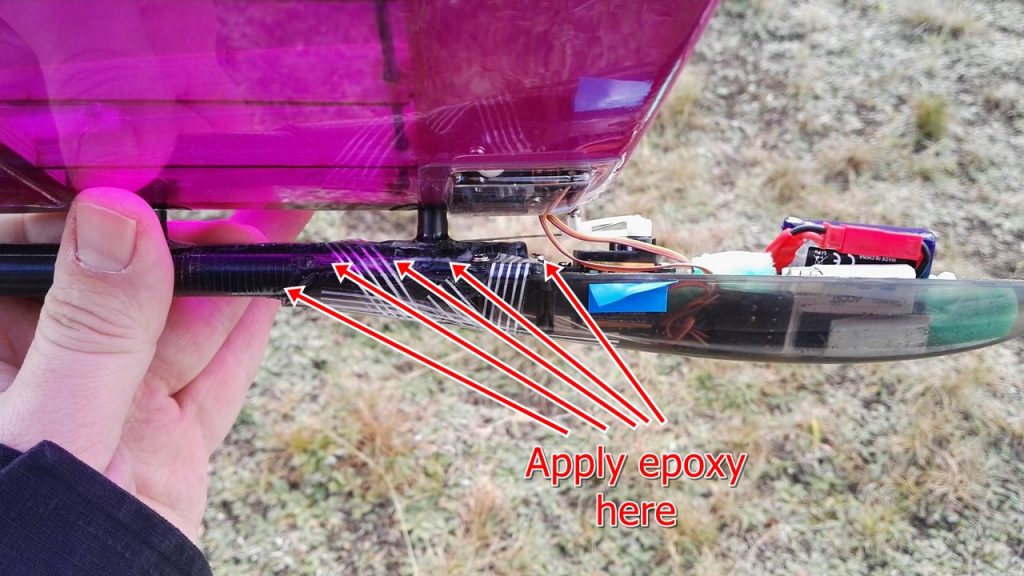
There is a penalty of course: nose section no longer can be detached. Since HobbyKing does not sell replacement parts for this model, this is not a big problem after all...
Read more... -
What's new in INAV 1.4
Although INAV 1.4 was not released yet, it's going to happen very soon. When? Probably in the beginning of a next week. Release Candidate is already available and until now, there are no major bugs discovered.
So, what's new in INAV 1.4? Quite a few...
- IMPORTANT: by default, motor output is disabled after flashing. This is to prevent servos from being damaged with too fast PWM rate. User has to enable motor output using Configurator (version 1.4 or newer) or with CLI command
feature PWM_OUTPUT_ENABLE - Asynchronous gyroscope processing. I've described some time ago why this is good idea to have something like this. With 1.4, asynchronous gyroscope is available, but not enabled by default yet. I will try to write a longer article how to set it up later (I hope at least I will find time for it). Until then, this entry in INAV docs is all that has been written on the topic
- Airplane launch assistant. Launching an airplane with INAV is almost as easy as it can be! You can read documentation on this feature on INAV Wiki
- Improved throttle PID attenuation (or rather PID scaling) for airplanes. Read documentation on the topic
- Emergency landing for airplanes
- Experimental Pitot tube support (logging only) compatible with Pixhawk PX4 Airspeed Sensor
- Improved handling for GPS+MAG and GPS+BARO configurations. With INAV 1.4 it should be not required to disable MAG and BARO when GPS is used
- Improved failsafe
- New targets: Airbot F4 / Flip32 F4, Omnibus F4 and YuPiF4
- Multiple bugs fixed
Additionally, new version of INAV Configurator has been already released. All users are advised to update! With Configurator 1.4.1 and firmware 1.4 following new features will be available:
- Possibility to enable motor output
- Gyroscope hardware filtering (
gyro_lpf) and syncing PID loop with gyroscope (gyro_sync) setup - Advanced PID tuning now allows to set:
- Gyroscope software LPF cutoff frequency
- Accelerometer software LPF cutoff frequency
- D-term cutoff frequency
- Yaw P-term cutoff frequency
- MAG_HOLD yaw rate limit
- Axis acceleration limits
- Yaw P limit and yaw jump prevention limit
- I-term ignore rates
- IMPORTANT: by default, motor output is disabled after flashing. This is to prevent servos from being damaged with too fast PWM rate. User has to enable motor output using Configurator (version 1.4 or newer) or with CLI command
-
Omnibus F4 Pinout
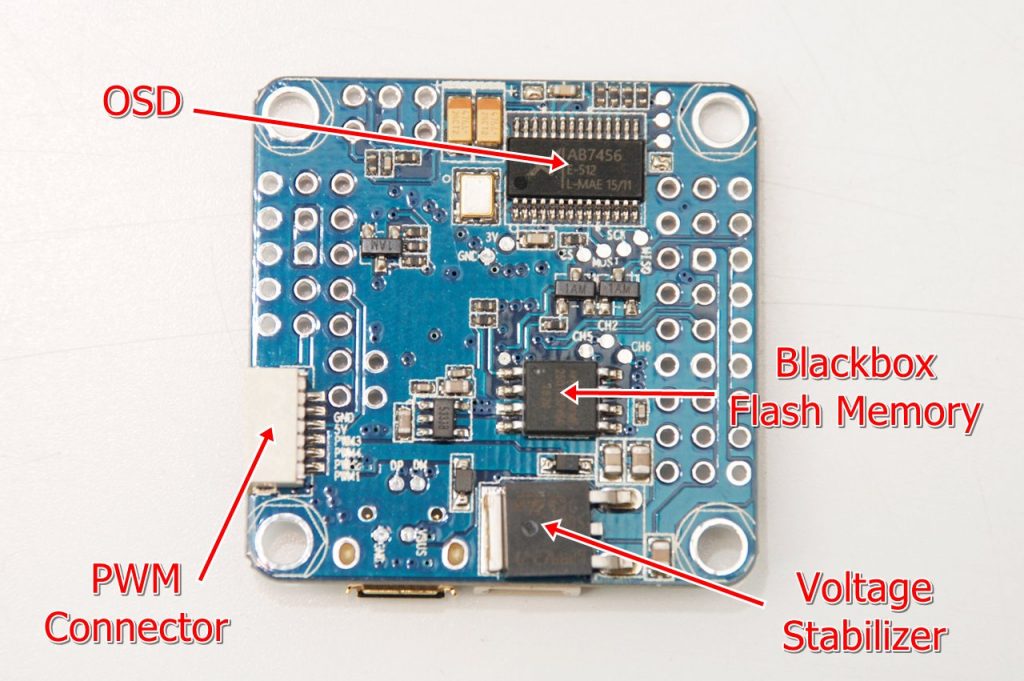
Omnibus F4 is a new family of All-In-One (AIO) STM32F4 based flight controllers with integrated OSD (On-Screen-Display) for FPV purposes. Basically, it is Airbot F4 / Flip32 F4 with added MAX7456 and some minor tweaks.
- OSD connected via SPI bus
- VCP port
- 3 UART ports, UART3 is shared with I2C
- Hardware inverter on UART1 allows to connect S.Bus receivers
- Dedicated PPM/S.Bus connector
- DSMX connecter
- PWM connector that allows to connect 4 PWM channels
- Integrated voltage stabilizer and voltage monitoring
- Analog current monitoring
- Analog RSSI monitoring
- Buzzer connector
- Integrated 16MB Blackbox flash memory
Currently, only Betaflight and Raceflight (?) supports OSD on this board. INAV OSD support is on its way.
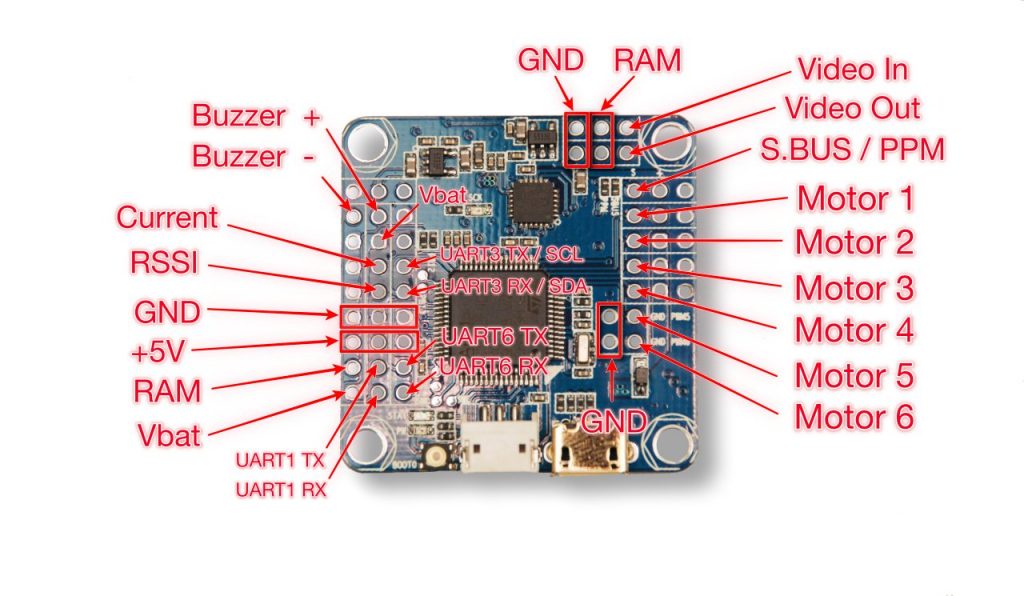
Notes:
- RAM pins are connected only to each other. For OSD only GND and Video IN and Video OUT lines have to be connected with camera and VTX
- Integrated voltage stabilizer tends to get hot when powered from 4S. Do not try to power camera or VTX from it
- Current and RSSI are NOT 5V tolerant. 3.3V max
- S.Bus and DSMX are shared with UART1
- To use UART1 and PPM, SBUS jumper has to be removed
Omnibus F4 can be purchased as Airbot Omnibus F4, Flip32 F4 Omnibus and "no-name" from Banggood and other Chinese shops.
Read more... -
FrSky X12S Horus spotted in the wild
Last weekend I had a brief opportunity to take a look at new radio from FrSky: X12S Horus. One thing is sure, this thing is quite impressive. For me it is slightly too big and too expensive. Plain old Taranis suits all my needs. Owner seems too be quite happy with his X12S Horus, and here are his main thought about it:
- Big and heavy with a stiff frame. As long as you do not have to carry it attached to your neck for a longer period of time, it is completely fine
- LCD screen is nicely visible in daylight
- Nice Hall effect gimbals!
- Rubber bumpers allows to put Horus on a car's roof or hood without the risk of scratching it
- Shipped with FrSky software, that is not as good as OpenTx
- External antenna connector with a VSWR
Read more...
-
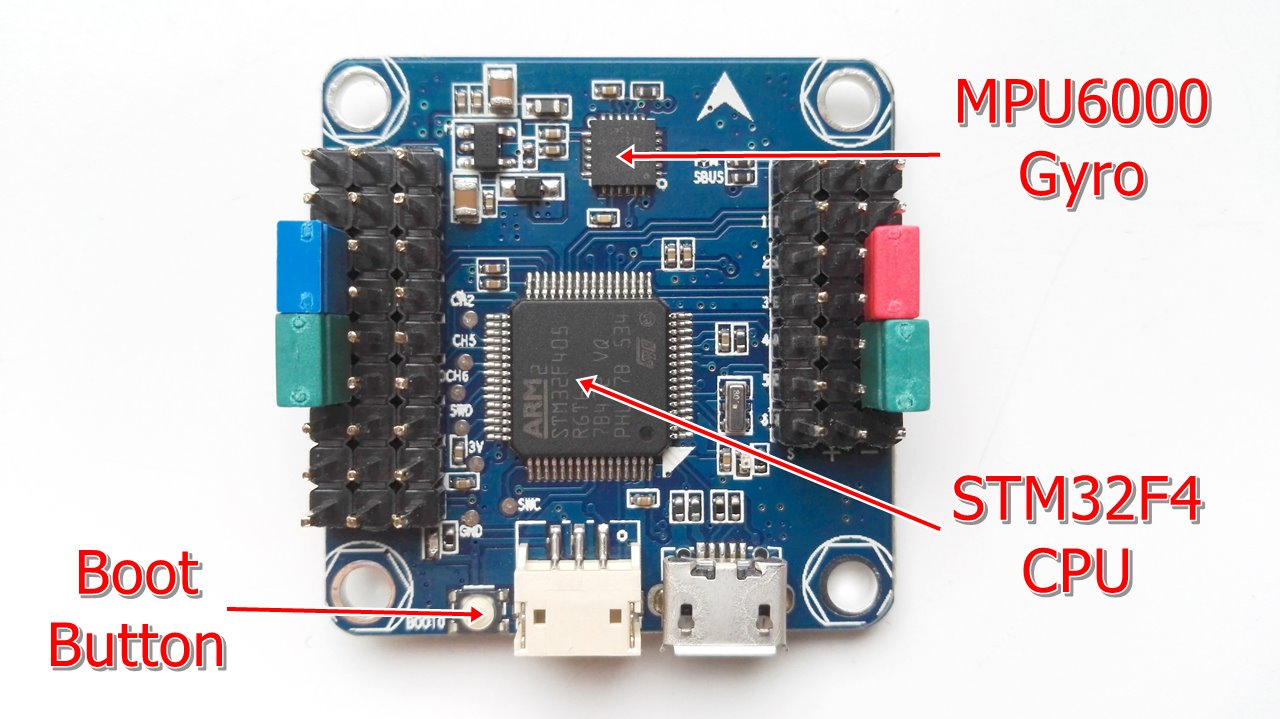
MPU6000 vs MPU6050 vs MPU6500
MPU6000 and MPU6050
Deep down, MPU6000 and MPU6050 are the same same hardware. They both have the same 3 axis gyroscope and the same 3 axis accelerometer. Both allows max 8kHz gyro sampling rate. From a flight controllers point of view, the only difference between them is bus that connects them to CPU. MPU6000 allows for both I2C and SPI, while MPU6050 has only I2C. That makes MPU6000 better device, but only when SPI bus is in use. I2C is too slow to handle 8kHz gyro updates.
MPU6500
No, MPU6500 is a different monster. It supports both I2C and SPI, allows 32kHz gyro update rate and has much wider gyro signal bandwidth. Is also smaller and consumes less energy. So, in theory, it is much better device than MPU6000. There are some problems with it. First of all, it is much more vibration sensitive than MPU6000. While soft mounting of MPU6000 is usually not needed, MPU6500 will benefit a lot from it. Very often it is even required. Second of all, at this moment, only RaceFlight can utilize 32kHz gyro update rates.

MPU9150 and MPU9250
What are those two MPUs? It's rather simple this time.
- MPU9150 is a MPU6050 with integrated AK8975 magnetometer
- MPU9250 is a MPU6500 with integrated AK8963 magnetometer
-
UART1 and PPM on Airbot F4 / Flip32 F4 Flight Controllers
Today I've discovered another small but irritation limitation of Airbot F4 / Flip32 F4 also known as CC3D REVO for unknown reason. Looks like, by default, this board is unable to share UART1 RX line and PPM input. So, if you would like to connect, for example, OSD or GPS to UART1, you would have a problem. I've discovered that PPM input does not blocks UART1 totally, but makes UART1 transmission erratic and unreliable.
This is because PPM input pin is connected to both UART1 RX (pin PA10 of STM32F405) via inverter and PPM input pin (PB14) without inverter. Any electrical signal applied to PPM input would also be sent to UART1 RX.
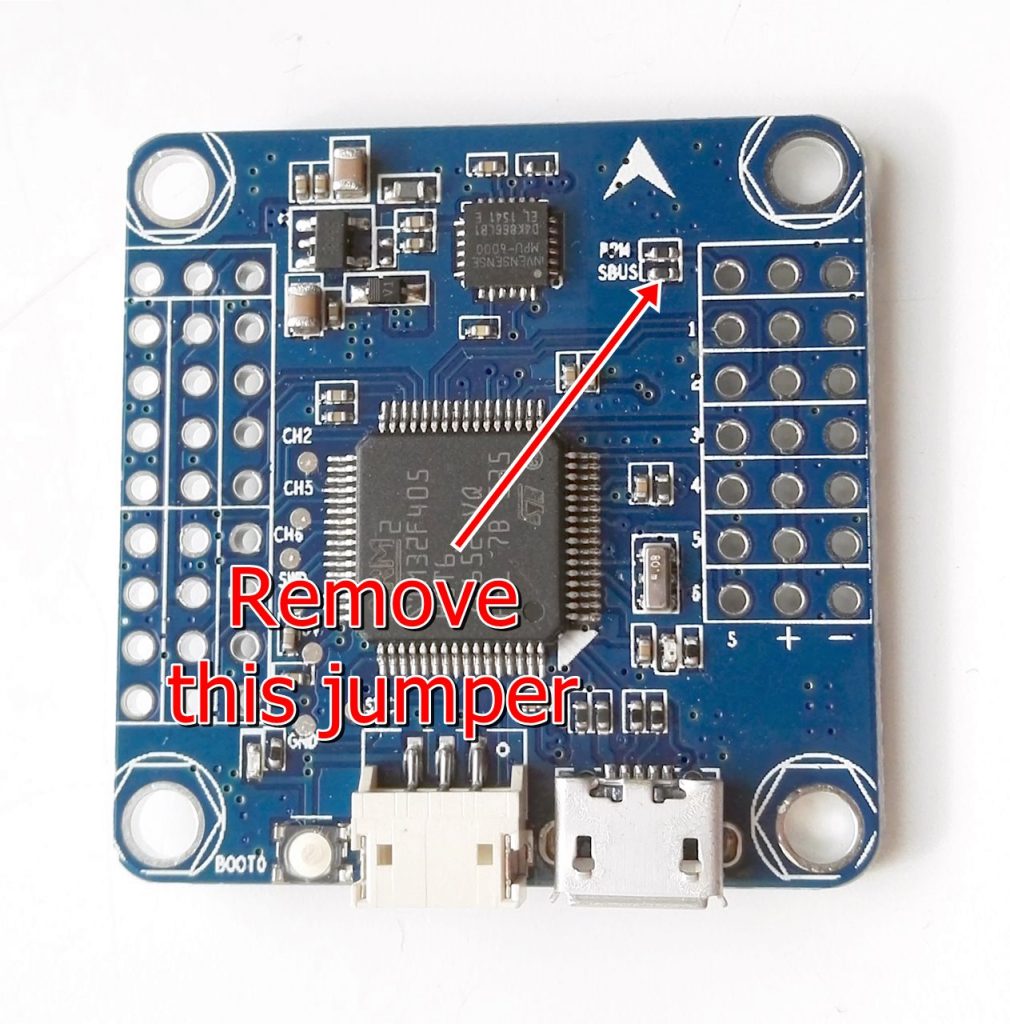
Luckily, there is pretty simple, hardware, solution to allow UART1 and PPM input function simultaneously. Jumper called SBUS located near SBUS/PPM input has to be removed with soldering iron. This operation breaks the connection between PPM/SBUS input and UART1 RX.
There is a drawback of this solution too. If jumper is removed, SBUS will not work. To make SBUS works again, jumper would has to be closed again. With a blob of solder for example...
Read more... -
Singles' Day Deals for DJI Phantom
In some countries 11.11 is an Independence Day. In some countries it's a shopping festival. If anyone want's to cut a good deal, this is one of the best times to do it. For example on GearBest which prepared very nice promotions for DJI Phantom series.

- DJI Phantom 3 Advanced for $580,99 (original price $799) with a coupon GBDJ3A
- DJI Phantom 3 Professional for $725.99 (original price $999) with a coupon GBDJ3P
- DJI Phantom 4 for $999.99 (original price $1199) with a coupon GBDJ4
-
How much power flight controller consumes?
Year after year flight controllers grow stronger, faster, more powerful. Three years ago we had MultiWii running Arduino. Two years ago it was Naze32 with STM32F1. Year ago it was SPRacingF3 with SMT32F3. This year it is something with STM32F4. Is there a price is power consumption to pay? Should we start using stronger BECs? 1A? 2A or maybe 3 amps are now required? I've decided to check.
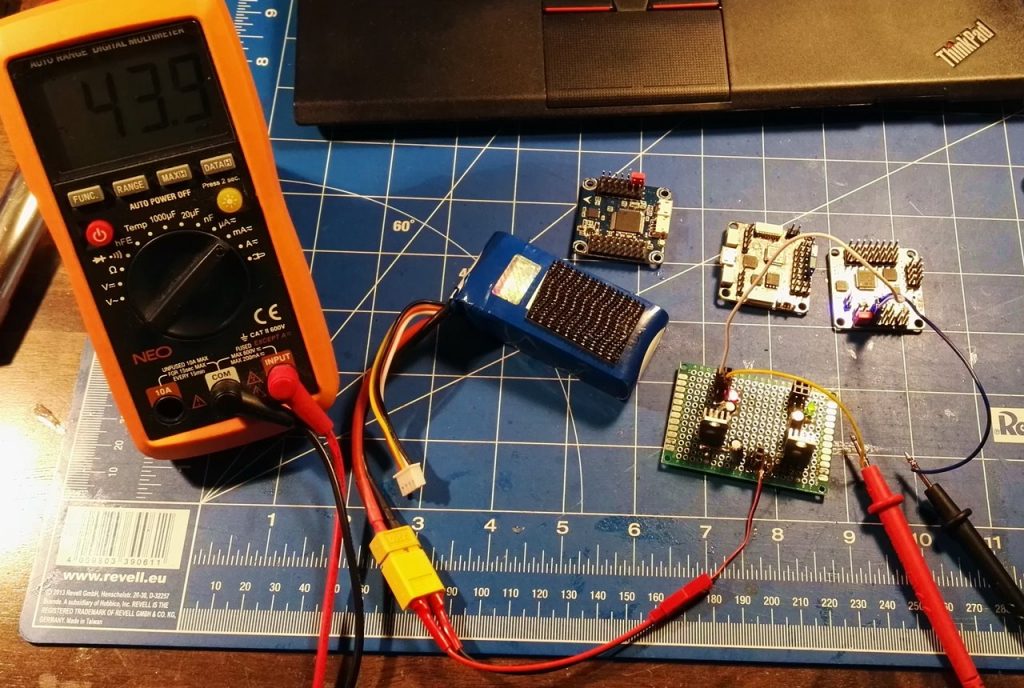
Measured current required by flight controllers I had on hand:
- Flip32+ 7DOF (special version of 10DOF without magnetometer): 44mA
- SPRacingF3 Acro (chinese clone): 55mA
- Airbot F4 / Flip32 F4: 93mA
So, there is a price to pay in terms of power consumption. But, let's be honest here. Even increase by more than 100% when going from F1 to F4 is not putting much drain on any decent BEC. Good and solid 1A BEC should be more than enough to power most setups.
Read more... -
INAV 1.3 has been released
I'm happy to announce new version of INAV ready do download from official repository.
What is new in INAV 1.3? Quite a few thinks. No "revolutions", more like steady progress. From most important things:
- INAV now supports PWM, OneShot124, OneShot42 and Multishot ESC protocols and asynchronous motors and servos updates
- Something for airplanes with a lot of servos: INAV can now supports PCA9685 PWM drivers and drive up to 16 servos plus motors! Although mixer can not yet support as many servos, this will change in future releases. I will try to write few words on this topic in a near future
- FlySky I-Bus telemetry
- Airplane auto arming with throttle option
- In case of airplanes (again airplane improvement!), I-term of PID controller is constrained to about 30% of max servo throw. This prevents from servo saturation that can happen in some cases before take off
- I2C improvements for STM32F1 and STM32F4 targets. This solves the problem of undetected BMP085, BMP180 and HMC5883L on Naze32, Flip32, OpenPilot Revolution and other boards
- Code cleanups, including removal of unused or very rarely used flight modes like SERVO1-3, GOVERNOR, LEDMAX and CAMTRIG
All users are advised to use latest INAV Configurator and reconfigure flight modes is configuration is to be restored from files! Owners or STM32F1 boards should consult hardware support map if features they are using are still supported.
Read more... -
Flip32 F4: what is where
Read more...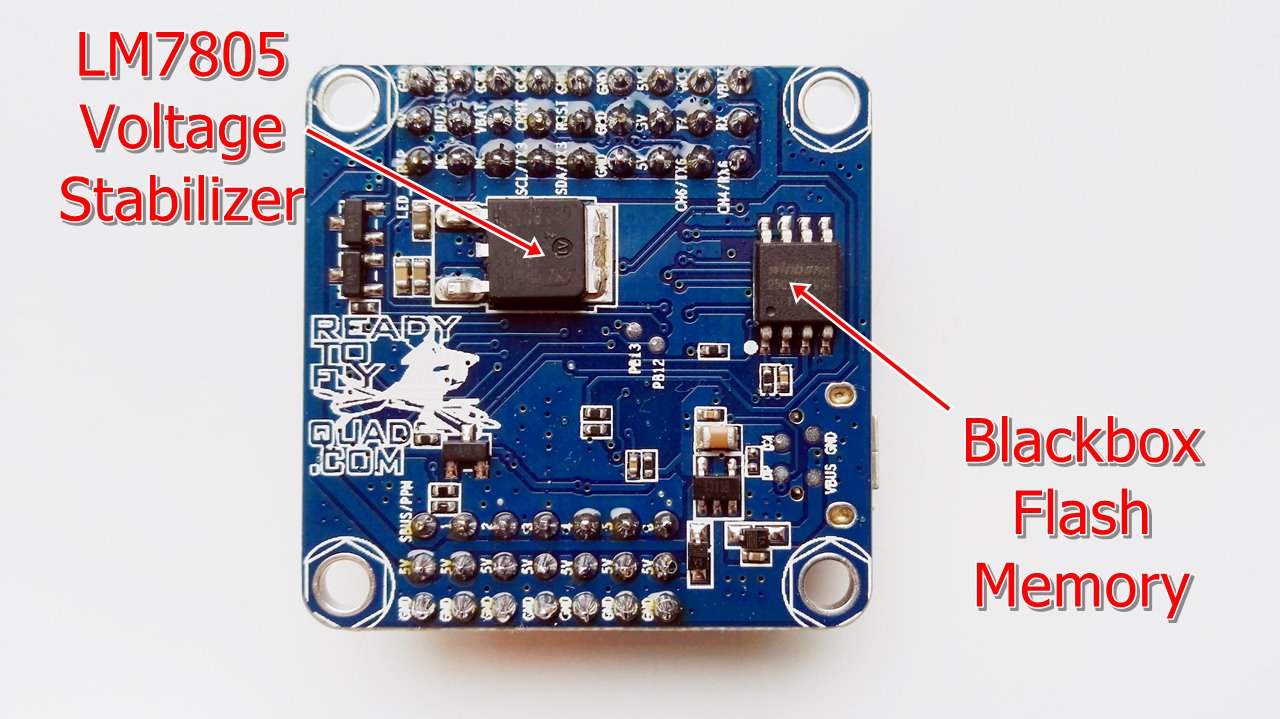












I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: